Jetson nano快速上手¶
下载镜像文件¶
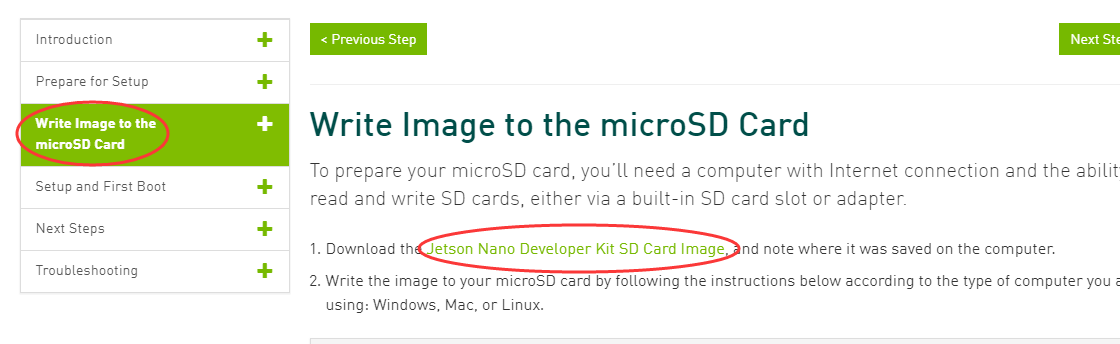
首先我们需要下jetson的镜像文件,实际上就是一个针对jetson nano优化过的ubuntu系统。 官方推荐是16G的高速tf卡,这里建议大家最少使用32G。因为后面加上各种模型数据和库,再打开swap区可以轻松超过20G。
大家可以前往下面网站,并通过在左侧选中第三栏,红圈的位置为镜像下载地址。 https://developer.nvidia.com/embedded/learn/get-started-jetson-nano-devkit#write
可以看到nv的下载速度还是不错的。
格式化TF卡¶
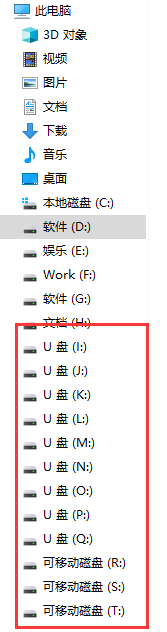
如果你的tf卡之前做过系统安装盘,或者有mac备份等等,新卡可以跳过这一步。通过官方推荐的SD Memory Card Formatter格式化tf卡。或者你想把tf恢复如初,也可以用这个工具。(tf卡刷了jetson镜像后插到电脑上会出现十来个u盘盘符)
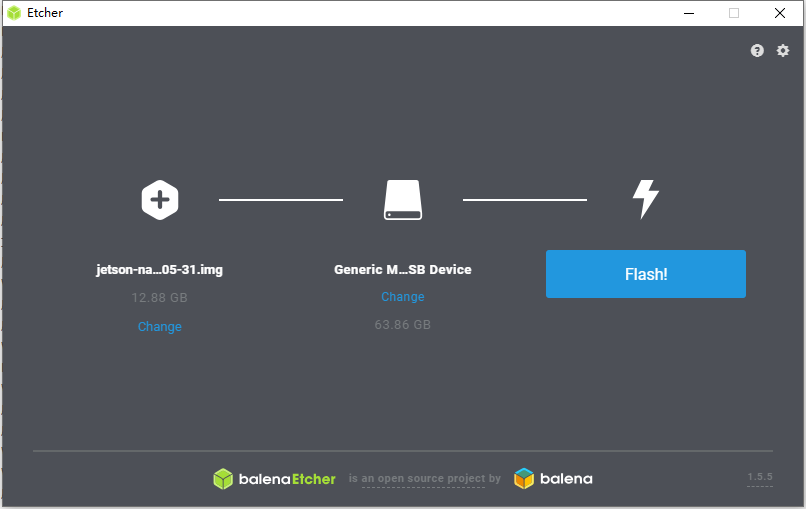
我们下载官方推荐的etcher工具进行镜像烧录。 https://www.balena.io/etcher/
第一项直接选中我们刚刚下载的zip文件,etcher不需要解压刚刚下载的zip文件,会自动读取里面的镜像文件。
之后就开始漫长的烧录过程了,如果你的sd卡读卡器还是USB 2.0或1.1估计要半个小时以上。USB3.0的读卡器大约需要10分钟,注意电脑机箱上蓝色的(9p)才是usb3.0的接口。
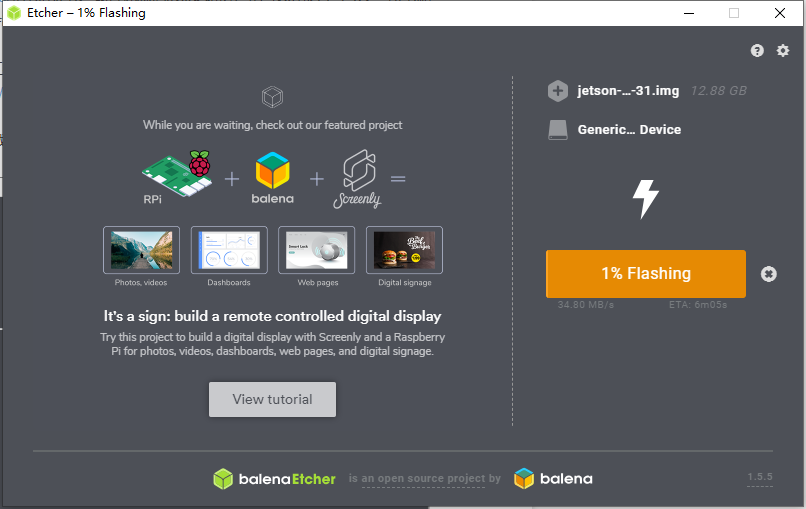
当烧录完成后如果电脑上弹出来一堆盘符这是正常现象,将读卡器弹出就好了~
首次启动jetson¶
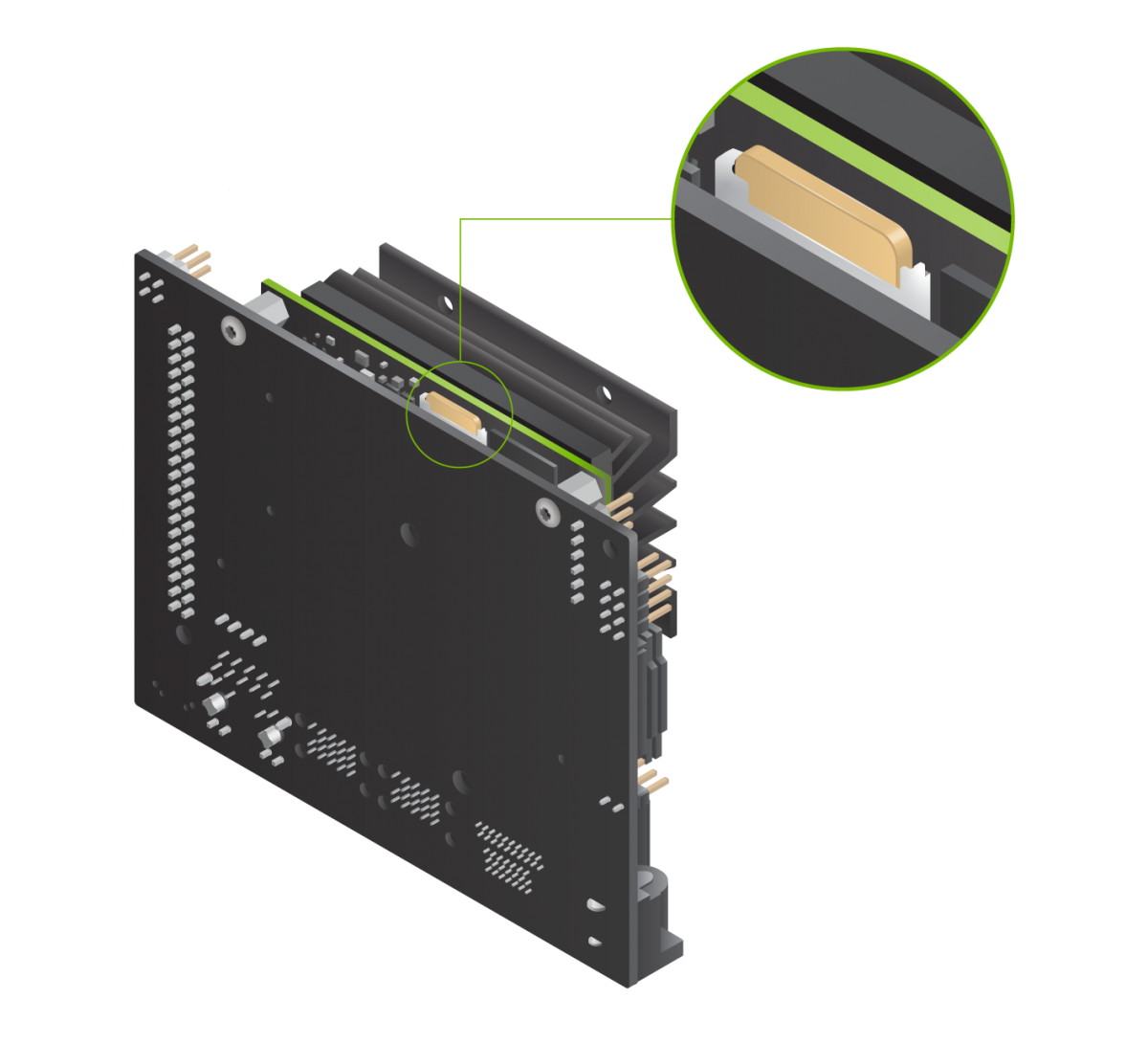
将tf卡插到jetson主板背面:
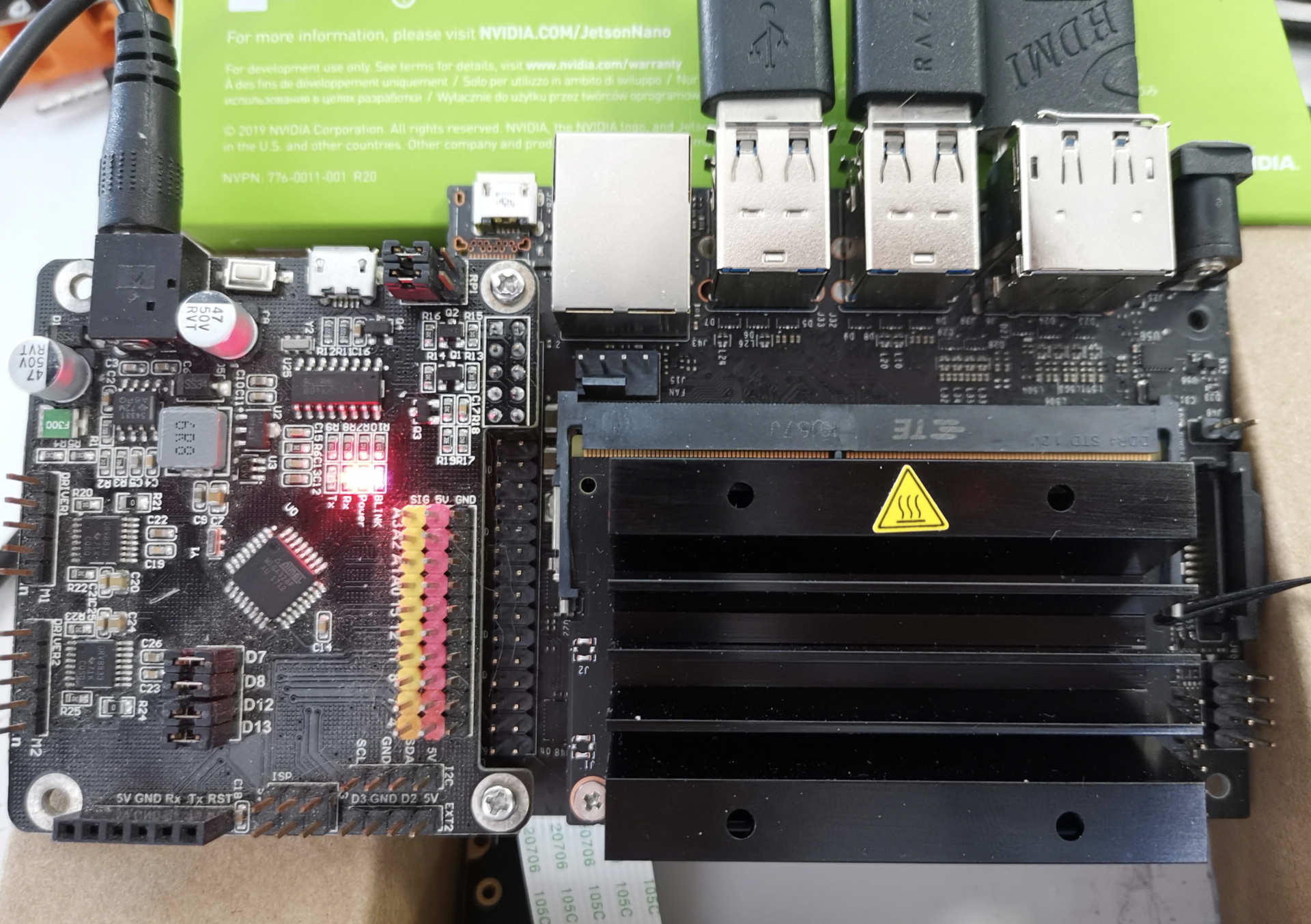
 之后插上hdmi线,键盘鼠标和网线。电源可以选择micro-usb口,这里需要使用5V 3A的适配器或充电宝。如果使用外部适配器,请一定要选择5V输出的,并且输出电流在3A以上。
Jetson nano的DC接口只支持5V输入,请千万别将5V以上的适配器插到jetson上面。
使用外部适配器还需要闭合dc口后边的跳线帽。
之后插上hdmi线,键盘鼠标和网线。电源可以选择micro-usb口,这里需要使用5V 3A的适配器或充电宝。如果使用外部适配器,请一定要选择5V输出的,并且输出电流在3A以上。
Jetson nano的DC接口只支持5V输入,请千万别将5V以上的适配器插到jetson上面。
使用外部适配器还需要闭合dc口后边的跳线帽。
如果手上有小喵家rosbot主板可以像下面这样将主板连接到jetson,安装的时候需要额外的2.5mm铜螺柱,rosbot的dc口支持6~12v的电源输入。再三强调,千万不要手滑把高于5v的电源直接查到jetson上。
首次启动后需要完成ubuntu剩下的安装过程,除了时区外基本选默认就行了。
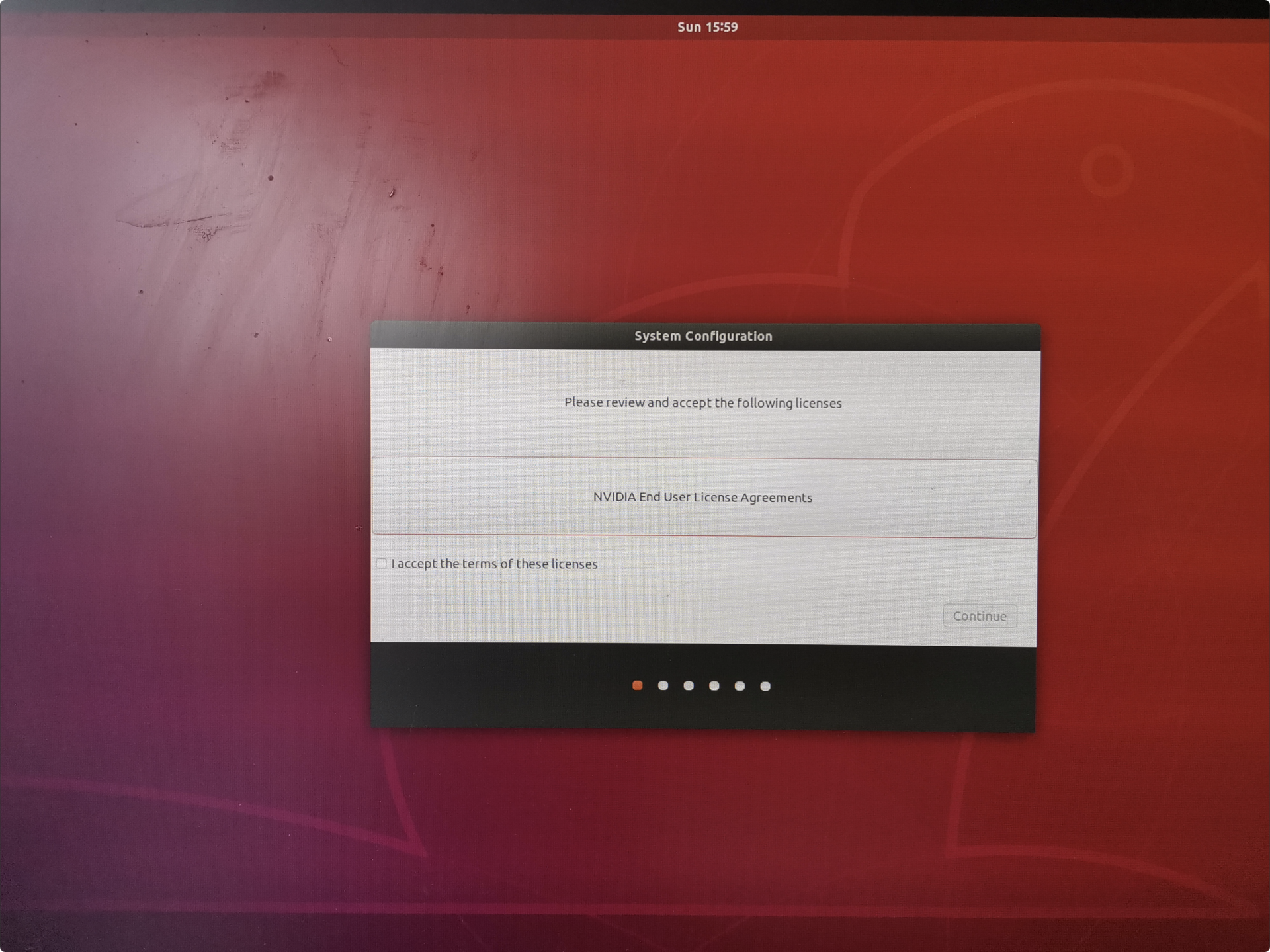
对ubuntu或linux不熟的同学请牢记打开终端的快捷键是 ctrl+alt+t ,linux下的图形化节目我们用的不多,大部分东西都是在命令行下操作~
关于wifi模块和摄像头模块的选择¶
网上大部分卖jetson板子的卖家都会配Intel 8265的wifi模块,因为这个在jetson内置自带 驱动支持。但是ubuntu理论上支持大部分usb的wifi模块,如果缺少驱动先使用有线网络更新一下就行了,通用的ubuntu安装教程应该都能用。 摄像头模块也是如此,大家可以直接使用现场的树莓派的摄像头。或者也可以选用各种usb摄像头,但是需要注意的是选择usb摄像头需要修改部分程序的camera设备为/dev/video