五路巡线模块¶
产品名称¶
五路巡线传感器模块
适用人群¶
适合培训机构做巡线课程案例,同时适合diy及爱好者用于巡线小车等高级应用
配送清单¶
五路巡线模块 x1
产品简介¶
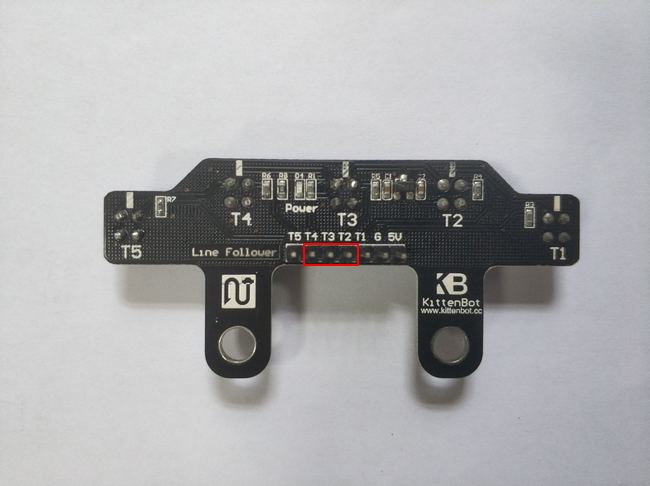
五路巡线模块是一款包含5组循迹传感器的模块,可以完全满足各种条件下的巡线机器人制作,用于任何5V的主控板,能够完美匹配microbit+robotbit拓展板的使用组合。使用microbit平台的编程免去了繁琐的底层库调用,令编程思维更清晰简单,其中Robotbit拓展板为巡线小车的各种外设提供了丰富的IO口和电机舵机驱动,真正意义上实现一板多用及可拓展性。
产品特色¶
基于图形化编程使用方便
采用五路ITR20001/T红外光探测器,高灵敏度、抗干扰、性能稳定
模拟输出精度高
结合PID算法,小车巡线定位更精确
掌握红外探头原理
产品参数¶
长x宽x高:72mm x 33mm x 17.5mm
净重:6.5g
毛重:根据包裹最终大小决定
技术参数¶
工作电压:3.3V~5V
电流:1A
探头间距:11mm
固定孔尺寸:5mm
感应距离:1cm~5cm
五路巡线模块接线¶
Robotbit–五路巡线模块
P2–T4
P1–T3
P0–T2
GND–G
5V/3.3V–5V(这个地方如果线不够长,可以直接接在3.3V和同一列的GND)
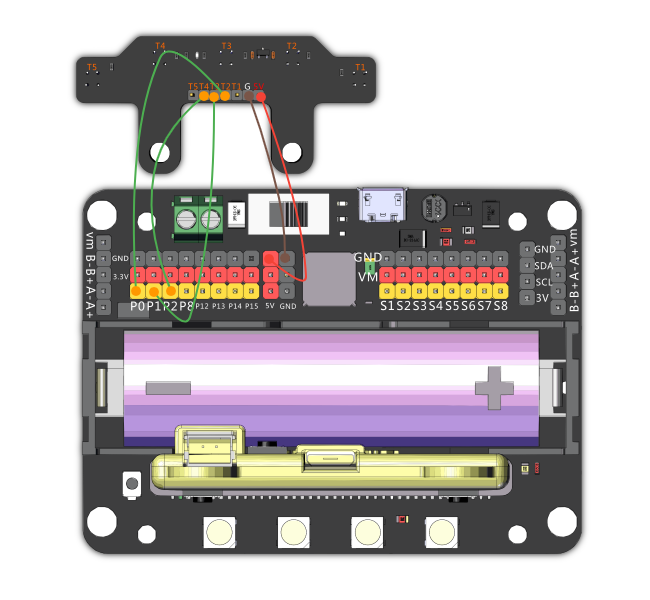
下面程序中用到的电机接线为 M1A:红-/黑+ M2B:红+/黑-
使用环境¶
Kittenblock/Makecode可连接硬件:Microbit&Robotbit
Arduino:Rosbot主控板
使用方法¶
编程方式:Kittenblock/Arduino/Makecode
兼容硬件(配合硬件,或者配套什么使用):microbit+robotbit拓展板
小喵教程集合地址:learn.kittenbot.cn
小喵论坛地址:kittenbot.cn/bbs
网易云课堂:搜索小喵科技
更多的实时讨论,请加入爱上小喵科技官方Q群:568084773
在makecode中编程,要使用的积木块首先我们需要导入拓展包

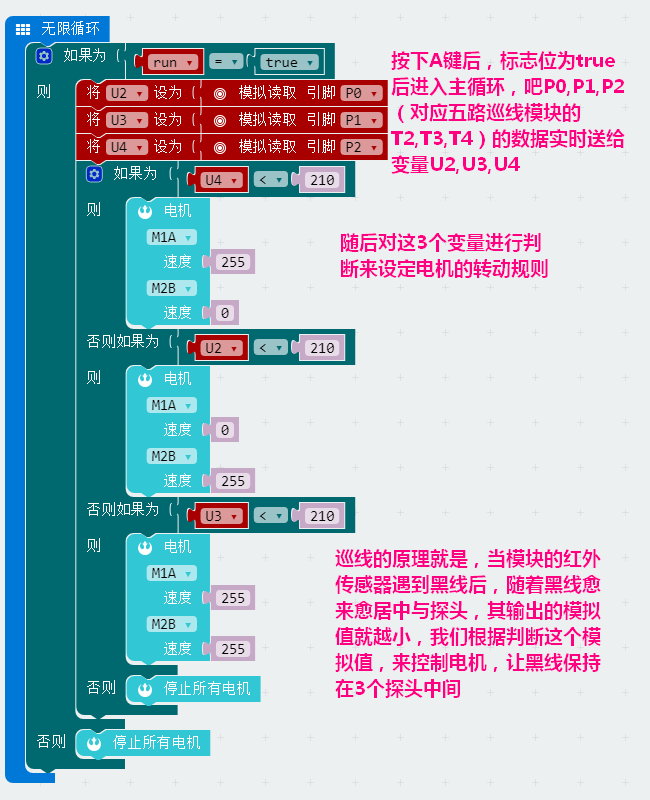
关于读取巡线模块的数值是使用如下积木块
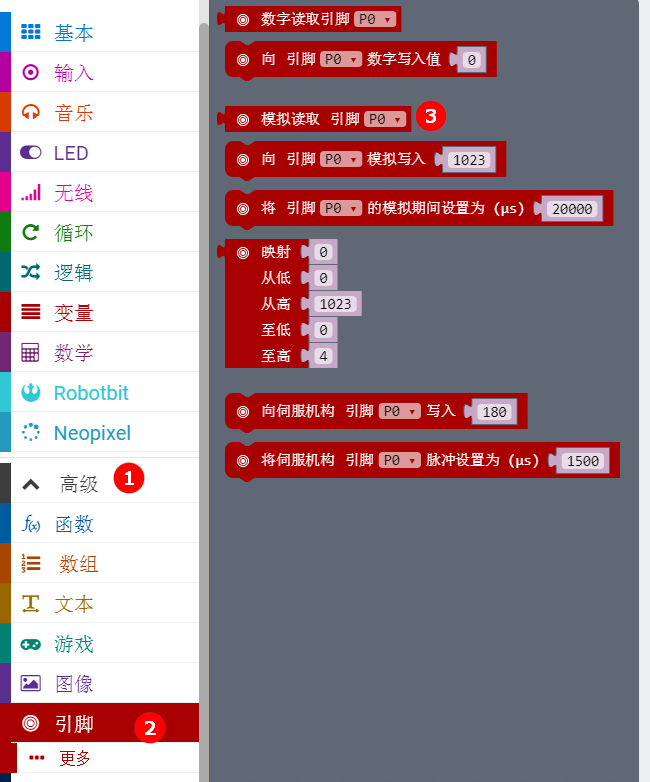
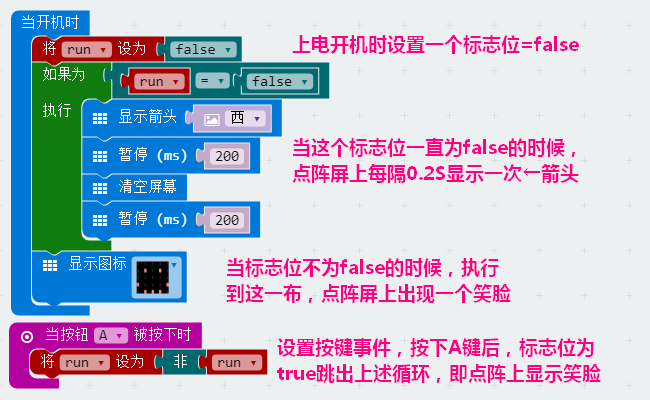
接着我们根据读取的数值进行逻辑编程
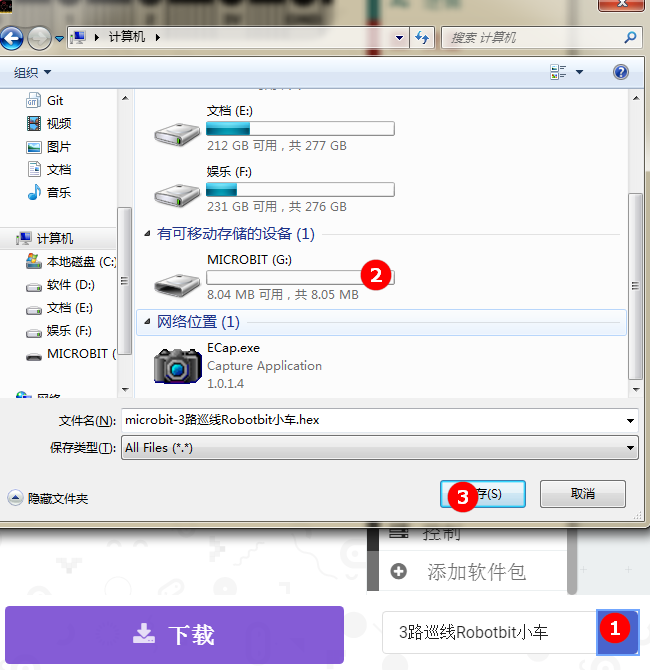
我们使用保存到microbit盘的方式下载程序
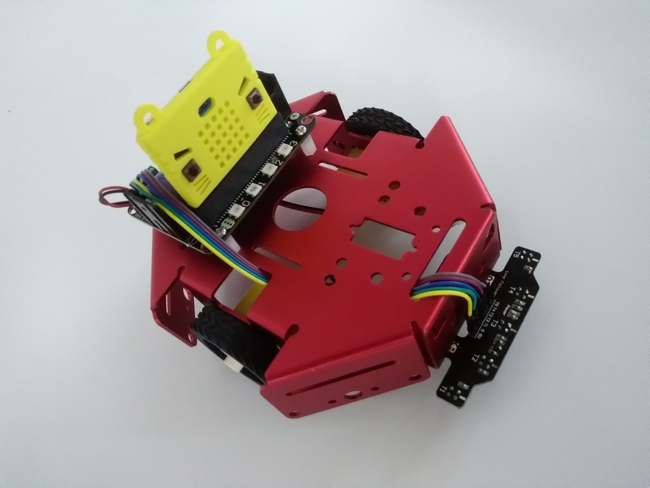
效果展示¶
