Geekservo¶
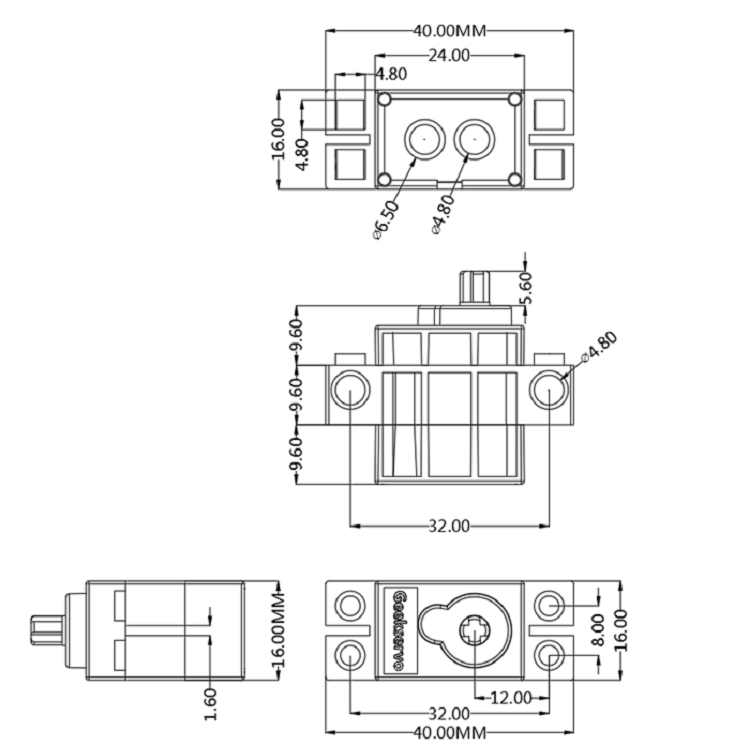
规格¶
工作电压:3.3V~6V 额定电压:4.8V 额定电流:200ma 堵转电流:700ma 打滑电流:450ma 最大扭矩:500g.cm 最高转速:70rpm(3V供电情况下) 净重:12.4g(单个) 接口:红黑线(没有严格正负极,调换线序只会影响电机正反转)
规格¶
工作电压:3.3V~6V
额定电压:4.8V
额定电流:200ma
堵转电流:700ma
打滑电流:450ma
最大扭矩:500g.cm
角度转速:60°/0.12s
净重:12.8g(单个)
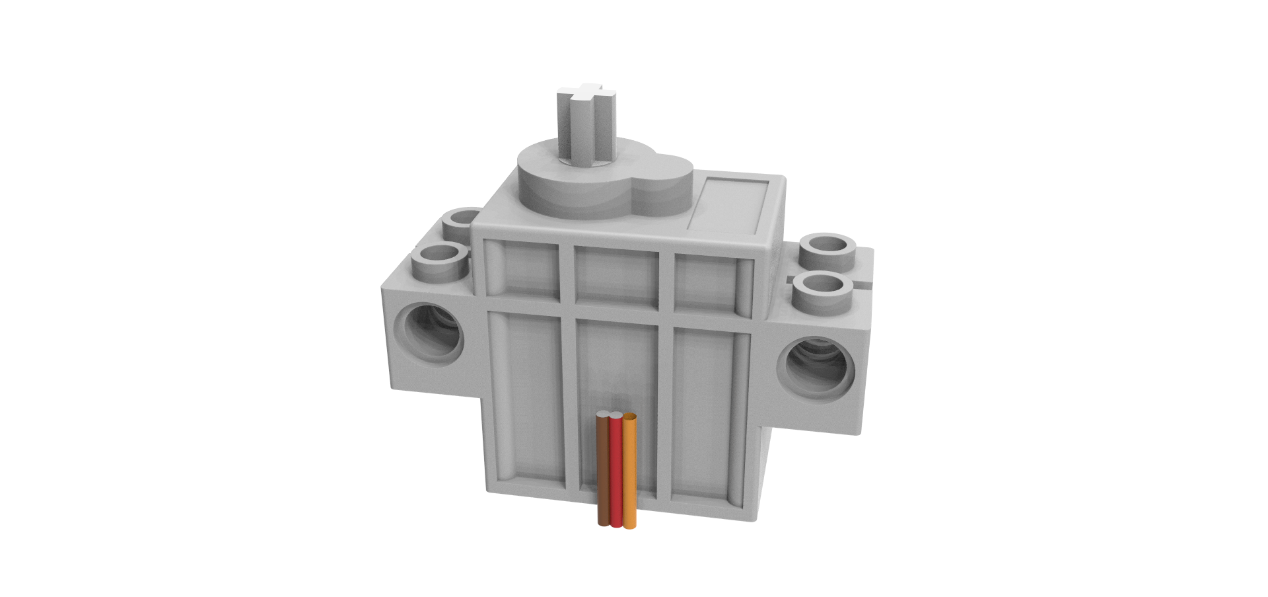
常规舵机线序:
棕色接负极
红色接正极
黄色接数据引脚(控制引脚)
Geekservo特色¶
极力齿过载保护。 遇到输出轴被暴力拧时,极力齿就开始工作,会进行哒哒哒进行跳齿保护。而不会损坏舵机。
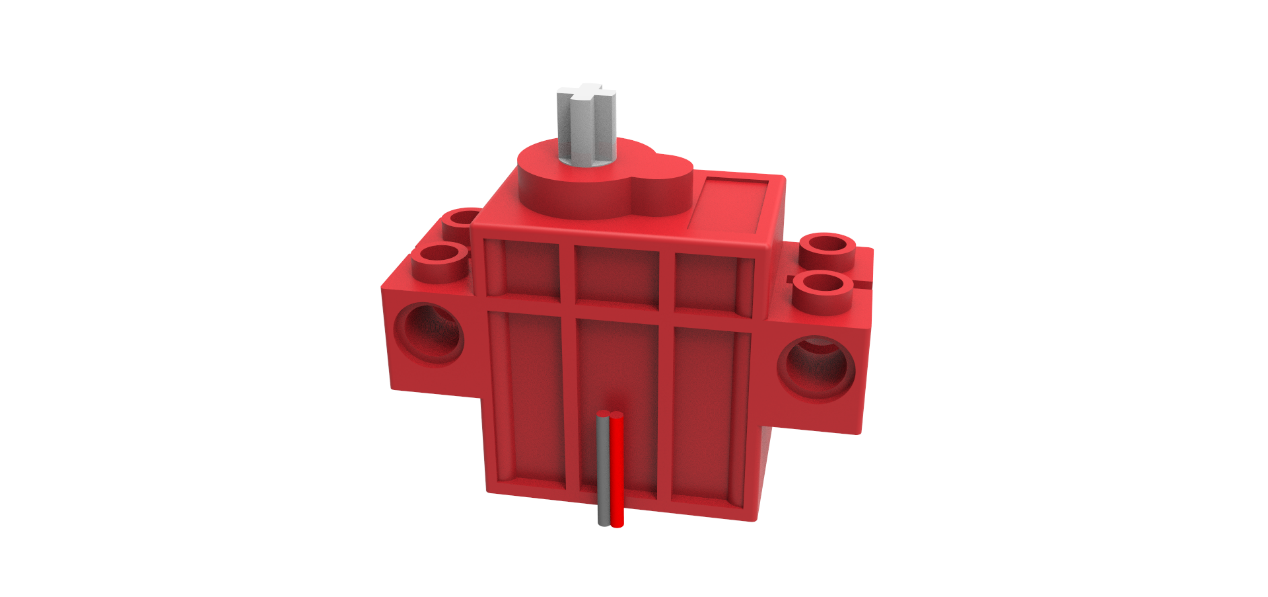
安装方式灵活。 有Technical安装方式与普通乐高砖块两种安装方式。输出轴是乐高标准的十字轴
体积小巧。 方便各种小制作的搭建。
控制简单。 乐高舵机采用了常规的脉宽方式控制,与常规9g小舵机控制方式类似。乐高电机可以用普通电机驱动板输出PWM脉冲进行速度控制。
注意事项¶
Geekservo属于小型电机类,使用场景不要超出最大扭矩要求和不要超出最大电压要求。
Geekservo舵机有严格的线序要求,请根据线序进行插接。Geekservo电机无线序要求,调换线序只会影响电机正反转。
Geekservo禁止长时间堵转,长时间堵转有可能导致电机烧坏。
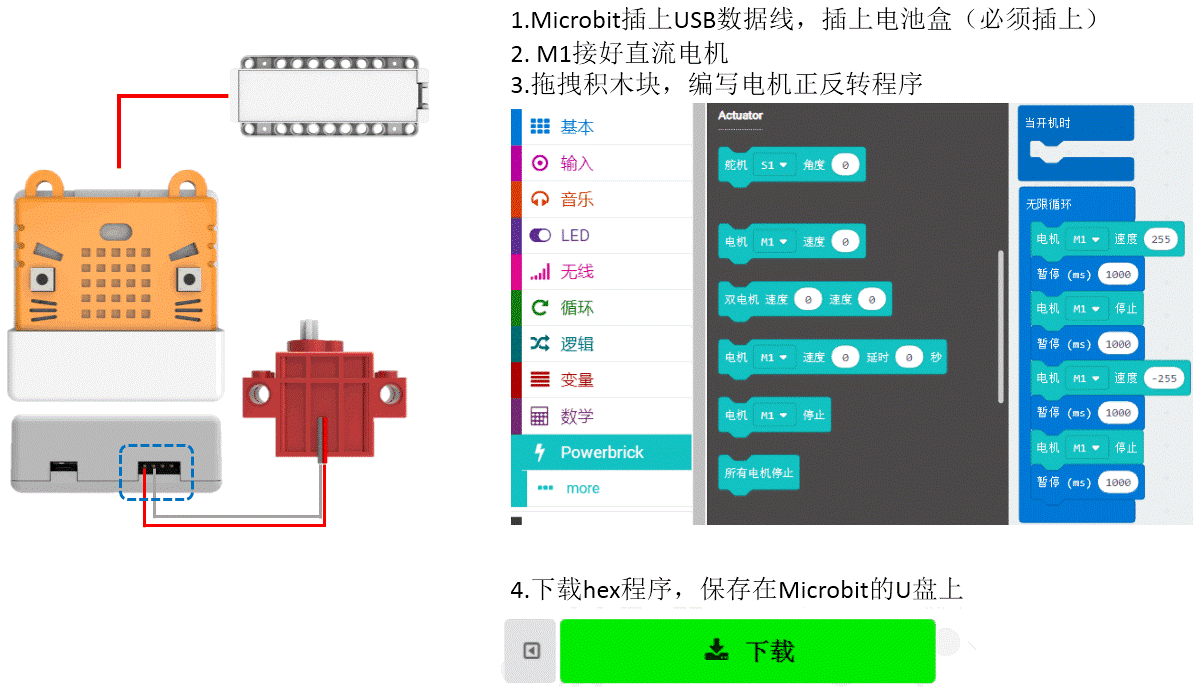
Geekservo电机编程¶
Armourbit上一共有两个直流电机接口,分别是M1和M2。使用时,注意程序与实物接线要对应。
(如果你使用Robotbit或者Rosbot主控板,只需要把Geekservo电机插接到电机接口,对应编程使用即可)
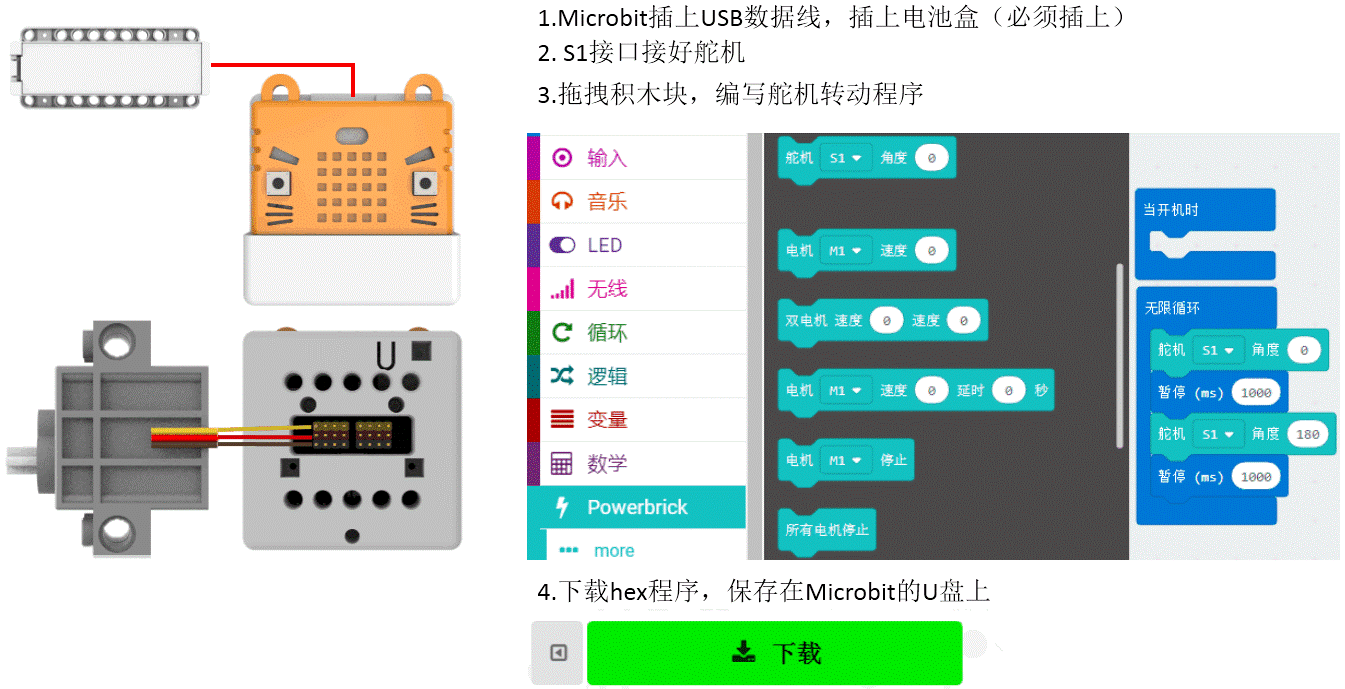
Geekservo舵机编程¶
Armourbit上一共有八个舵机接口,分别是S1-S8。使用时,注意程序与实物接线要对应。
(如果你使用Robotbit或者Rosbot主控板,只需要把Geekservo舵机插接到舵机接口,对应编程使用即可)