Microbit-OTTO机器人¶
产品名称¶
OTTO人形机器人
适用人群¶
舵机的配合控制有难度,适用于有一定编程基础及动手能力的爱好者

产品简介¶
OTTO机器人全身含8个舵机分别控制每个关节部位,其人形的特点使之更具亲和力及趣味性。通过图形化编程,让轻松控制机器人行走及摆出不同动作的目的成为现实,其中令OTTO搞怪跳舞也是极其有趣。另外在图形化编程过程中,避免了冗余复杂的底层代码加载,你可以仅仅通过拖动那些编程积木块便可跨越技术门槛去实现你的idea,熟话说把事情做专做精,没有了那些底层库的繁琐调用,已不仅是入门创客爱好者的福音也同样是学习编程思维的最好办法。
产品特色¶
图形化编程上手快
8舵机运动灵活
人形更符合机器人概念
可拼装注重动手能力
锻炼编程逻辑思维
可拓展性强
产品参数¶
长x宽x高: 135mm x 70mm x 111mm
净重: 245g
毛重:根据包裹最终大小决定
技术参数¶
电压:5V
电流:1A
板载全彩RGB灯
8舵机同时运动
可编程蜂鸣器
18650-3.7V可充锂电池
入门基础¶
可能很多友友第一次买到这样的套件,之前也没有接触过Microbit板子,也不知道什么是Robotbit。所以在后面的编程,对于大家来说可能跳跃太大了。
为了帮助新手尽快上手,小喵科技特意录了视频教程。有36个课时(每节平均大概5~10分钟,只讲干货)
所以避免后面的软件编程不知道如何上手。所以这里先提醒大家先看看视频。至少知道,你手上的电路板是干嘛的?有什么功能?如何下载程序?软件在哪里下载?
推荐按顺序看,但是如果你只是想把这个套件驱动起来,可以先看一下我标注的章节。这样针对性比较强。
Microbit板子的介绍和一些基础入门

Robotbit板子的介绍和一些基础入门

组合过程¶
首先写在前面的一个要点是,每个舵机的安装前应确保初始位置为90°
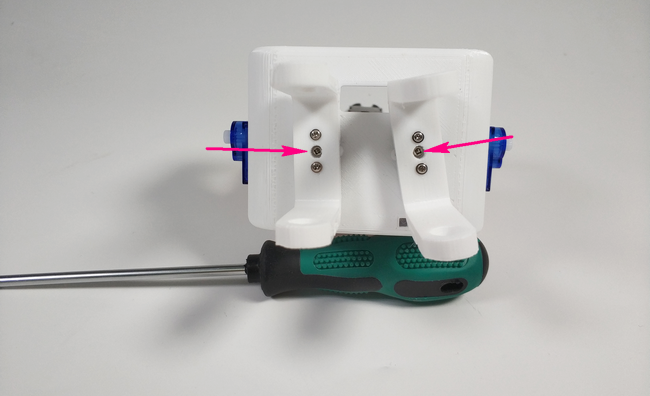
1.先认识一下组装过程中需要的螺丝
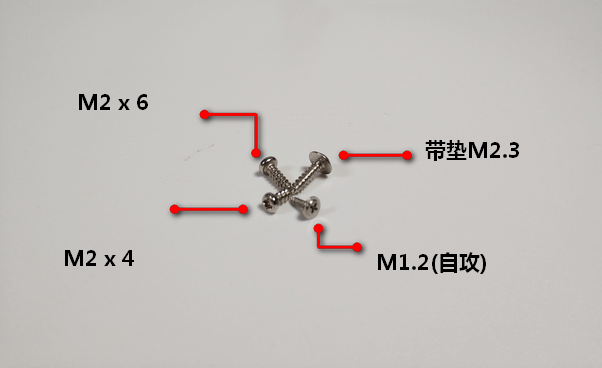
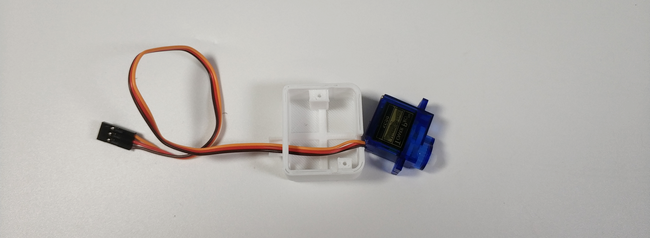
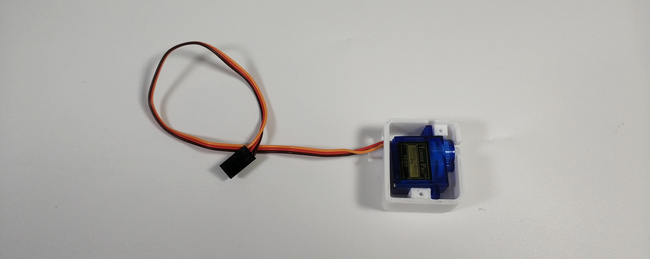
2.先将舵机包里的零件取出,4个关节都按照如图剪切卡位
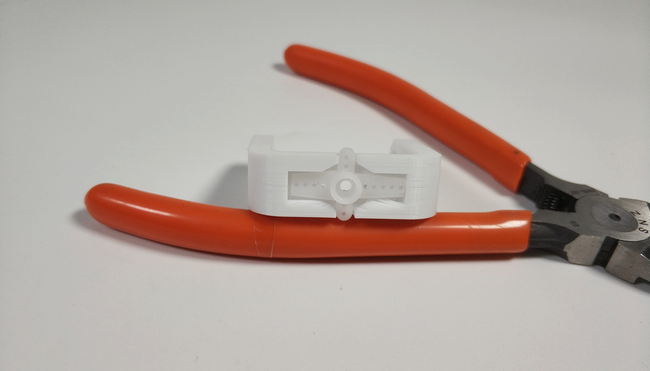

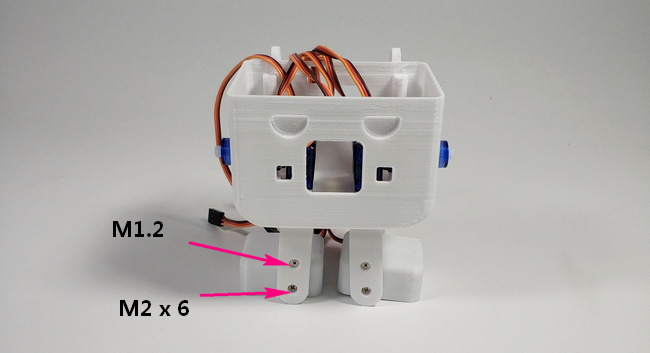
3.我们分别均给他们拧上M1.2自攻螺丝2颗固定

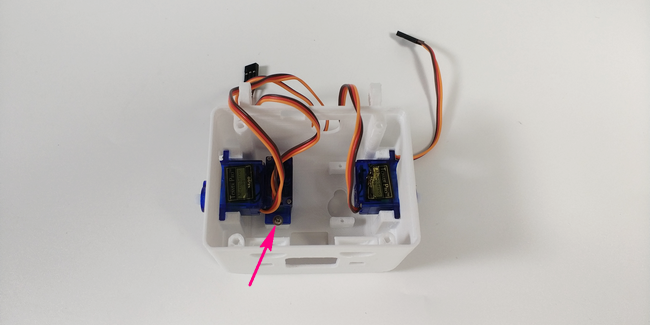
4.将4个舵机作为身体的4个主关节固定再壳子里,注意图中每个舵机均使用2颗带垫M2.3螺丝固定
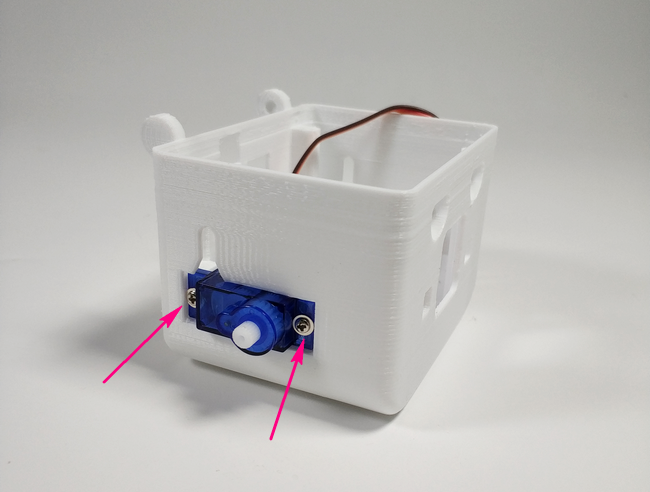
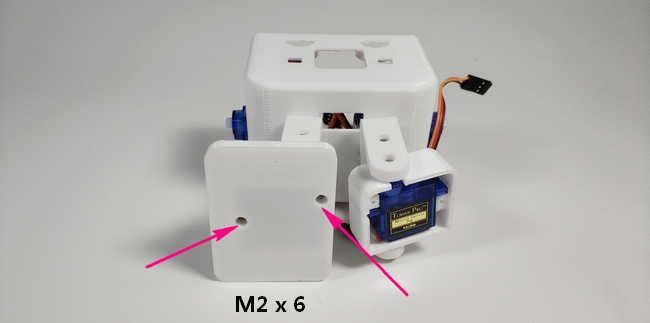
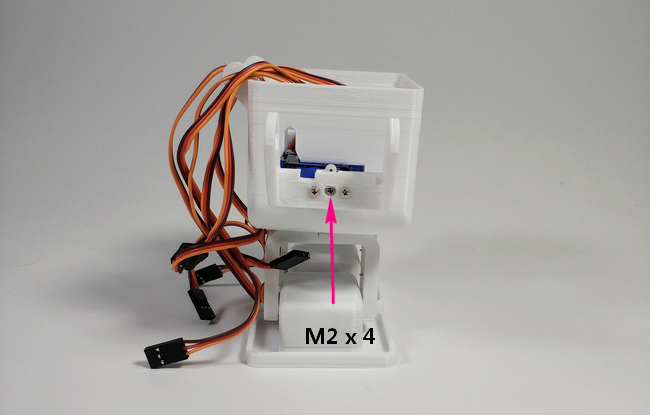
5.每个舵机和支撑关节分别用1个M2 x 4的螺丝连接固定
6.脚掌的部位按照如图安装舵机
7.脚掌与腿部的连接卡位及螺丝选配如图所示
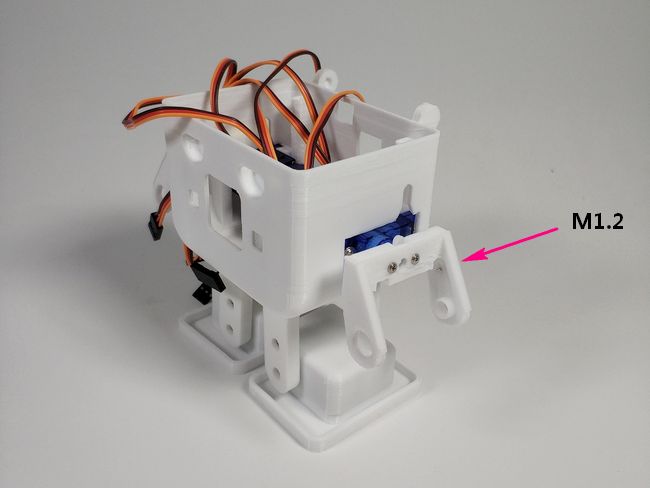
8.手臂部位的固定如图,背面固定舵机使用M1.2以及侧面积固定关节舵机也同样使用M1.2
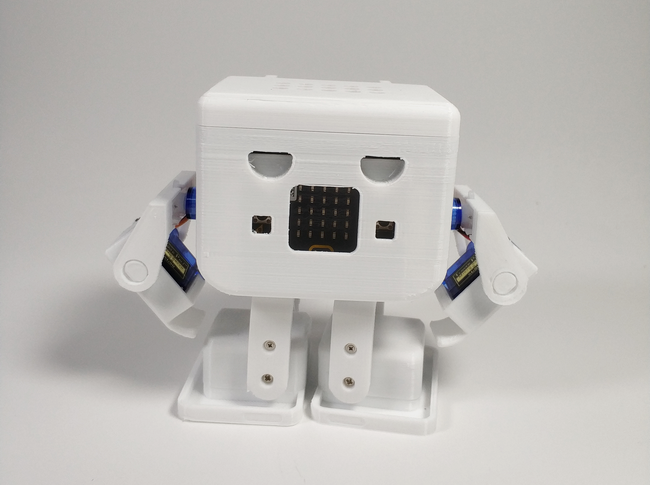
9.手的固定跟脚的相似,最后直接卡进去就打工告成了~
10.一切准备就绪就按照就按照图中的标示接线吧
使用环境¶
编程方式:Kittenblock/Makecode可连接硬件:Microbit
使用方法¶
兼容硬件(配合硬件,或者配套什么使用):两块microbit互联2.4G通讯控制
小喵教程集合地址:learn.kittenbot.cn
小喵论坛地址:kittenbot.cn/bbs
网易云课堂:搜索小喵科技
更多的实时讨论,请加入爱上小喵科技官方Q群:568084773
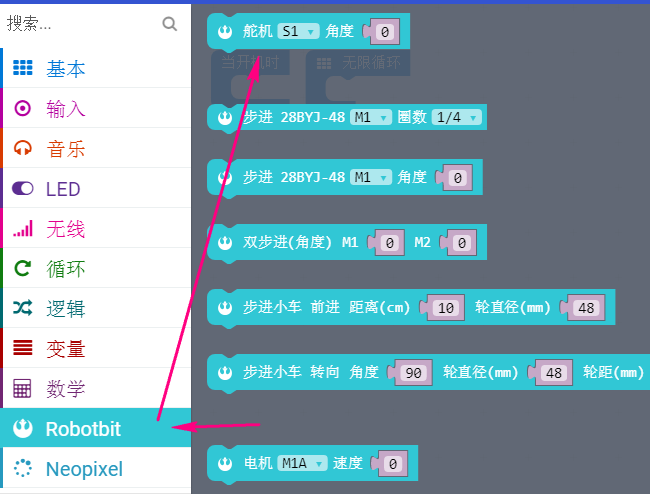
使用makecode编程第一步按照需求导包

我们控制otto动起来所需要的积木块是这个
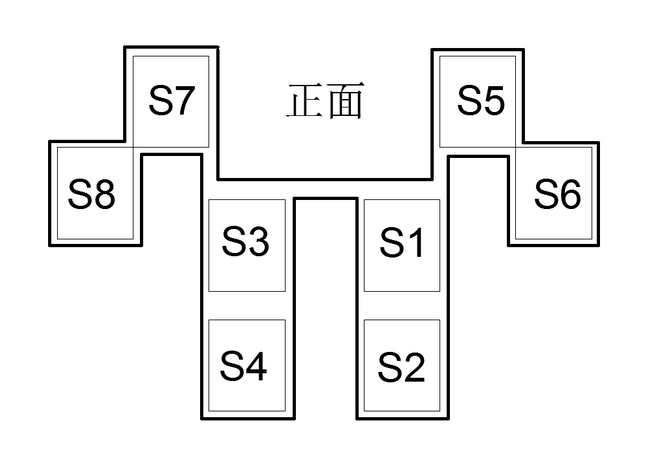
通过配合S1-S8的8个舵机按照不同角度和顺序运转最终实现OTTO的各种造型动作
这里给出一个现成的2.4G控制OTTO向前向后走的程序(针对不同的舵机安装误差角度,运动起来会稍有偏差,可以自行调整程序中数组中的数值)
注意事项¶
舵机初始角度确保90°(左右可旋角位移相等)
给出的程序是严格按照上述已给接线图
舵机角度有些偏差属于正常现象,可通过程序内稍作数值的调整
如果上述提示都无法解决你的问题,请加入小喵科技QQ交流群:568084773咨询
本产品只适用于14岁以上的儿童进行独立使用,8~14岁儿童请在家长或者老师的陪同下进行使用。 如使用前请按照小喵官方资料指导下进行使用,不要随便接插电路,切勿外接大电流舵机,大电流电机,以免烧毁电路板。 注意控制板不要通电置于金属表面,或者导电的物体上使用,以免短路 请避免在潮湿和有水的地方使用,以免短路 电路板或者机械上含有细小物件请不要吞食,请放在儿童接触不到的地方妥善保管