CNC 扩展板与步进电机驱动¶
Bridge开发的初衷就是一个多编程平台的机器人主板,这一节我们就结合Arduino的CNC扩展板演示下Bridge的步进电机控制的潜力。完整的CNC主板控制程序还需要大量的工作,当然这也在我们开发计划中,大家可以期待下 ~
Step 2 硬件准备¶
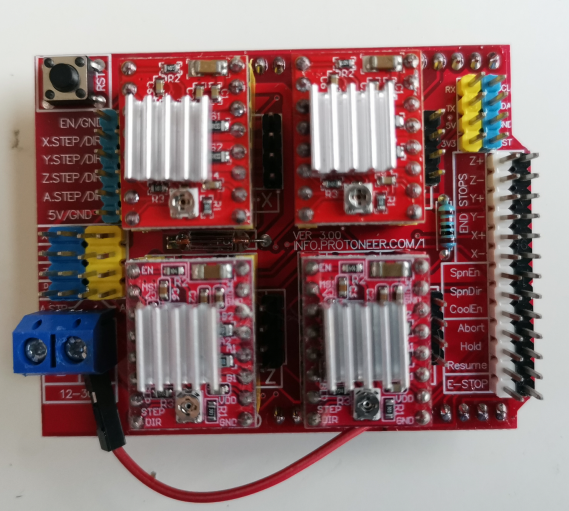
我们需要用到额外的CNC扩展板连接步进电机:
以下有几点需要注意的地方:
这个板子由于价格极低导致品质良莠不齐,大家拿到手后一定要检查下电源和地有没有焊短路,或者其他奇怪的地方是否有卡着锡珠。
由于需要额外的供电电源,这里我们为了简化供电直接将电源输入引到VIN脚,这样可以通过DC头给Bridge主板和CNC扩展板同时供电。
如下图:
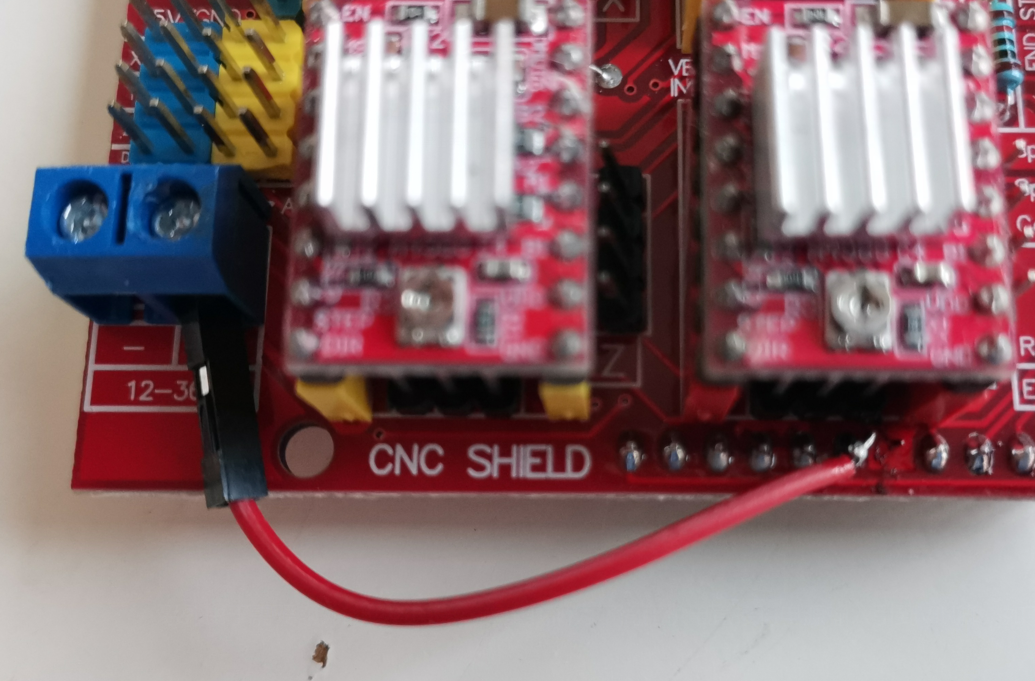
将VIN和CNC shield电源输入短接后,尽量不要将高于16V的电源接到DC头上,过高的输入电压有可能会导致Bridge降压芯片工作不正常
还要注意的是步进电机驱动模块千万不要插反了,注意看背后丝印 EN对着插槽的EN脚,如果插反了可能会烧驱动器芯片。
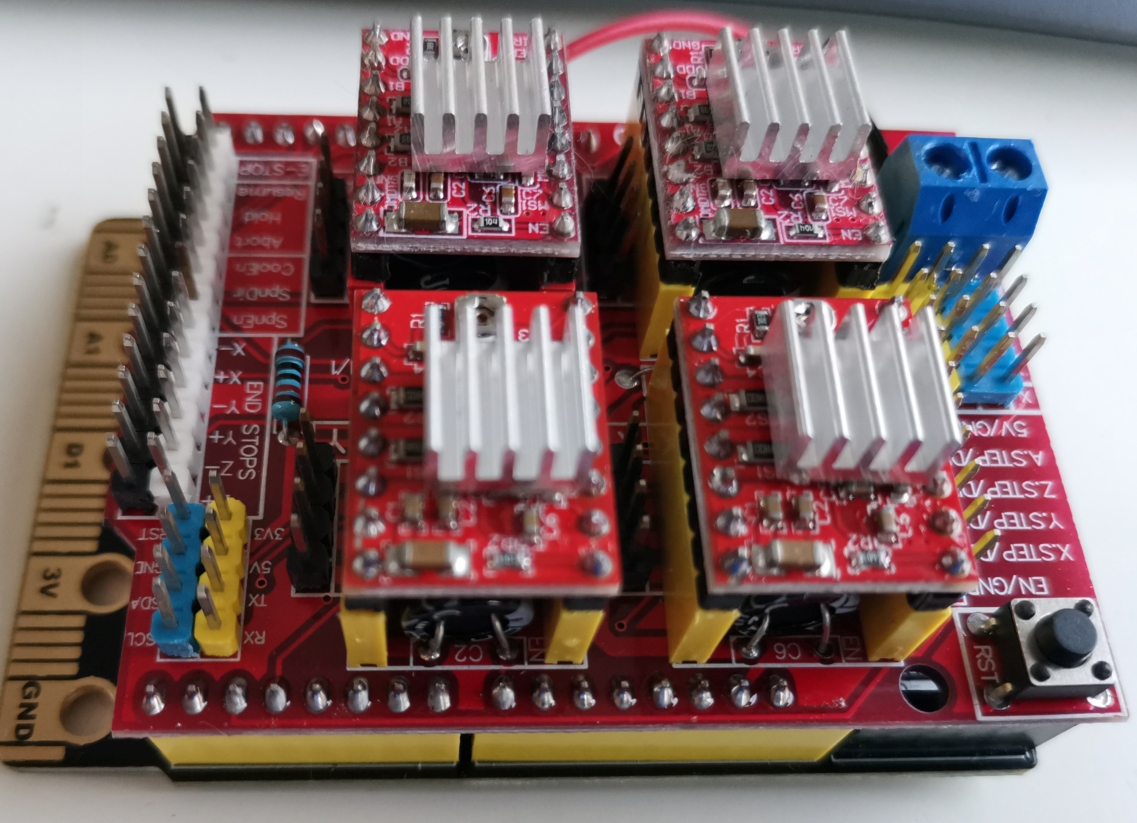
最后我们把CNC shield插到Bridge上,注意对齐引脚位置。
Step 3 程序引脚规划¶
在写程序前我们先要确定CNC扩展板的控制方式,我们可以在背后丝印找到对应IO的功能。我们知道常规类A4988驱动都是一个引脚控制方向,另外一个引脚发送步进脉冲。
本节我们用到的引脚如下:
D8: 电机使能
D7: Z DIR
D6: Y DIR
D5: X DIR
D4: Z STEP
D3: Y STEP
D2: X STEP
Step 4 编写步进电机控制程序¶
首先我们需要引入Accel的头文件,注意这里我们需要同时使用多个步进电机因此需要两个头文件,分别表示基础步进电机驱动和多步进电机的组合控制。
#include "AccelStepper.h"
#include "MultiStepper.h"
之后定义步进电机实例,和组合控制器。
AccelStepper stpX(AccelStepper::DRIVER, 2, 5); // step, dir
AccelStepper stpY(AccelStepper::DRIVER, 3, 6);
MultiStepper steppers;
在Setup函数中我们首先初始化点击使能IO,注意是低电平使能:
pinMode(8, OUTPUT);
digitalWrite(8, 0); // enable
之后初始化步进电机相关参数,并且将XY的电机和多步进电机控制器捆绑:
stpX.setMaxSpeed(600.0);
stpX.setAcceleration(200.0);
stpY.setMaxSpeed(600.0);
stpY.setAcceleration(200.0);
steppers.addStepper(stpX);
steppers.addStepper(stpY);
我们可以通过给
steppers.moveTo(stepPos)传递目标位置,接着通过steppers.runSpeedToPosition();等待两个步进电机运动到指定位置来实现同步运动。
完整代码如下¶
#include <Arduino.h>
#include "AccelStepper.h"
#include "MultiStepper.h"
AccelStepper stpX(AccelStepper::DRIVER, 2, 5); // step, dir
AccelStepper stpY(AccelStepper::DRIVER, 3, 6);
MultiStepper steppers;
long stepPos[2];
void setup()
{
pinMode(8, OUTPUT);
digitalWrite(8, 0); // enable
Serial.begin(115200);
stpX.setMaxSpeed(600.0);
stpX.setAcceleration(200.0);
stpY.setMaxSpeed(600.0);
stpY.setAcceleration(200.0);
steppers.addStepper(stpX);
steppers.addStepper(stpY);
}
void loop()
{
Serial.println("move to 1000");
stepPos[0] = 1000;
stepPos[1] = 1000;
steppers.moveTo(stepPos);
steppers.runSpeedToPosition();
delay(2000);
Serial.println("move to -1000");
stepPos[0] = -1000;
stepPos[1] = -1000;
steppers.moveTo(stepPos);
steppers.runSpeedToPosition();
delay(2000);
}
下载与观察结果¶
最后将程序下载到板子上,并且连接电机到指定的驱动口。注意常见的42步进电机需要8v以上才能正常工作,请检查你的DC电源是否有足够的驱动能力。
这一节我们介绍了基本的步进电机驱动,那么课后作业就请大家做一个XY绘图仪程序吧