Rosbot¶
产品名称¶
Rosbot主控板
适合人群¶
中小学生图形化编程/非专业DIY玩家
配送清单¶
Rosbot X1
产品简介¶
Rosbot主控板是由深圳市小喵科技研发的一款图形化编程主控板。它基于Mega 328P芯片的一款板子,与Arduino UNO的的主芯片是一样的。为了方便之前已经学过Arduino用户,我们做了兼容性管脚定义。因此喜欢用代码编程方式的,也可以用Arduino IDE进行编程制作。
Rosbot主控板所用的图形化编程软件Kittenblock,也是由小喵科技进行开发。由于图形化积木编程的容易理解,易上手。受到中小学生和老师、非专业爱好者的一致好评,轻松编程,快速上手,降低制作的门槛。
Rosbot上拥有非常多的可编程资源。丰富开放的IO口资源,板载直流电机/步进电机驱动芯片,还有各种扩展接口,Rosbot支持wifi下载程序,这个是其他arduino主控板不能做到的,非常方便产品DIY与调试。
产品特色¶
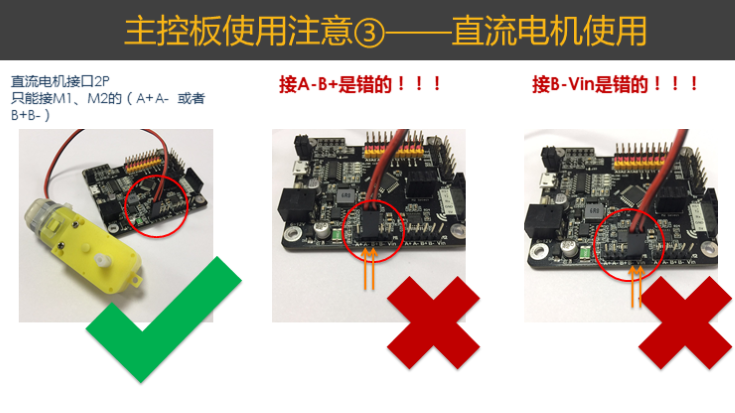
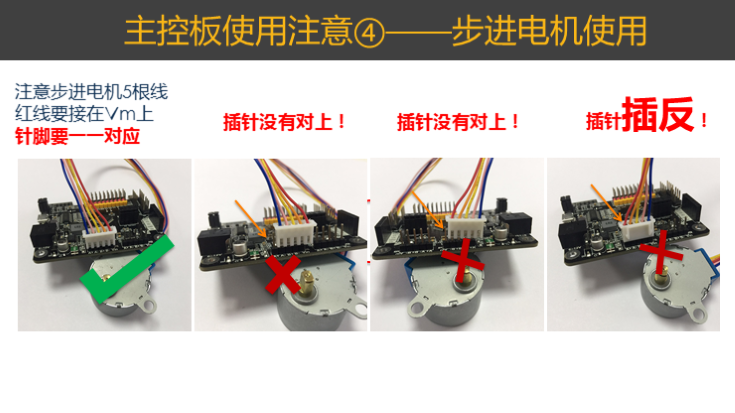
四路直流电机驱动/两路步进电机驱动,无需外接驱动
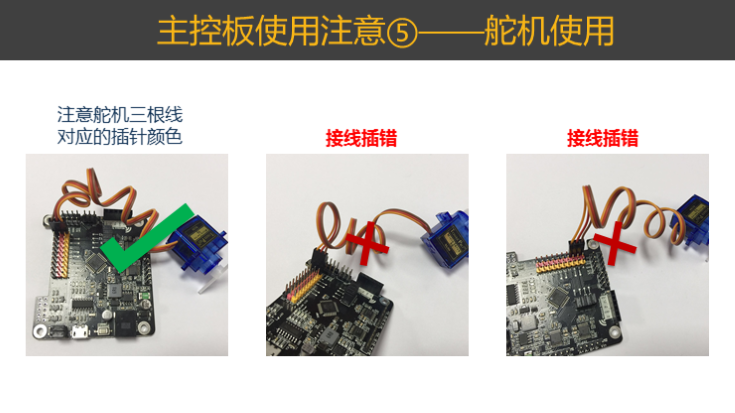
黄红黑常用arduino 3PIN接口,方便接插市面上的常用模块
支持wifi模块无线下载(需要另外购买wifi模块)
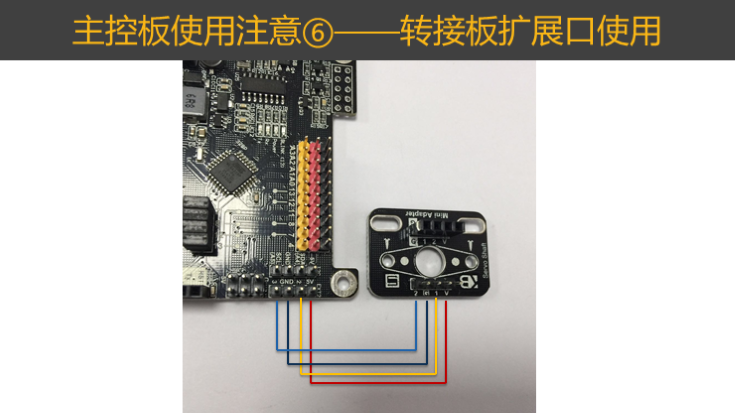
丰富的扩展接口,I2C接口,喵家4PIN接口,板载串口转出接口
精美特色丝印,让用户使用更加方便
支持与树莓派结合,非常方便控制底层电子模块
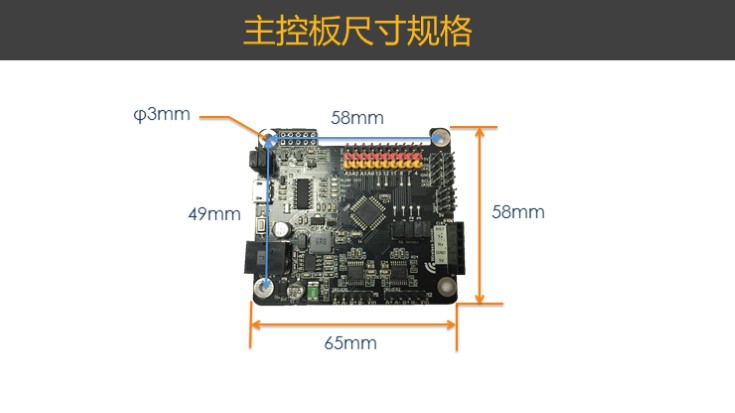
技术参数¶
主控芯片:MEGA328P(arduinoUNO)
串口芯片:CH340
USB电压:5V
外部电源接口:6~12V
过流保护:自恢复保险丝
Digital I/O 数字输入/输出端:2、3、4、7、8、11、12、13
Analog I/O 模拟输入/输出端:A0-A5
直流电机接口:四路
步进电机接口:两路
舵机接口:十路
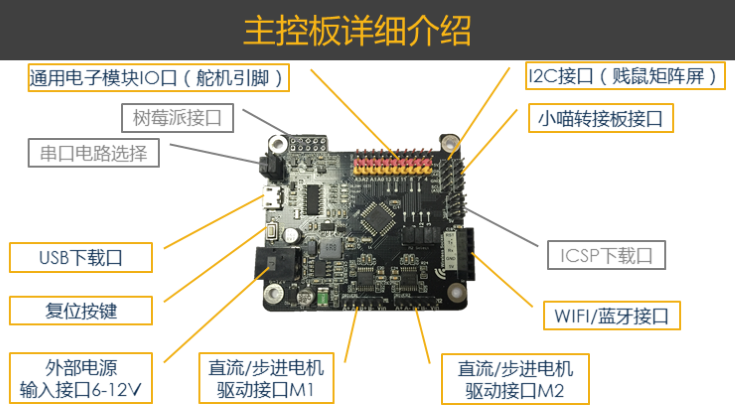
扩展接口:
I2C接口
喵家4PIN接口
树莓派接口
WIFI/蓝牙接口
串口功能:支持转出外部
编程平台¶
Kittenblock / ArduinoIDE(UNO)
快速上手¶
Kittenblock软件安装¶
软件下载与安装:https://www.bilibili.com/video/av70344368
安装驱动与恢复固件:https://www.bilibili.com/video/av70344368?p=2
在线控制与离线下载:https://www.bilibili.com/video/av70344368?p=3
在线控制与舞台交互:https://www.bilibili.com/video/av70344368?p=4
温馨提示:以上的视频的硬件板子基于Microbit。对于Rosbot除了硬件选择不一样,与安装驱动不一样,软件的其他操作方式都是一样的。大家先看看视频,先有个大概的概念,再跟着本文操作,就不会有问题了。本图文教程中还会针对于视频中不一样的地方进行讲解,所以大家可以安心看视频。
安装Rosbot的驱动¶
假设你已经成功安装软件,软件也升级到最新版本了。接下来你要安装Rosbot的驱动。
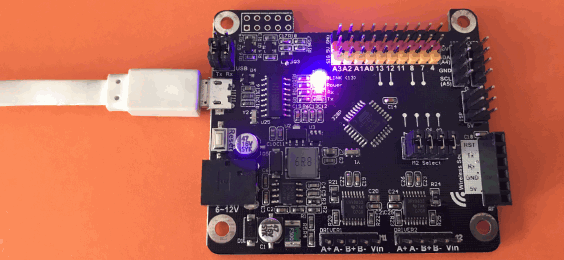
插上Rosbot¶
弹出窗口确定安装¶
PS:如果点击没有反应,应该是你软件的权限没有设置!
解决办法:右键Kittenblock图标——属性——兼容性——“以管理员身份运行”把勾勾给打上——应用,确定。再重启Kittenblock,再重复安装CH340驱动的操作。
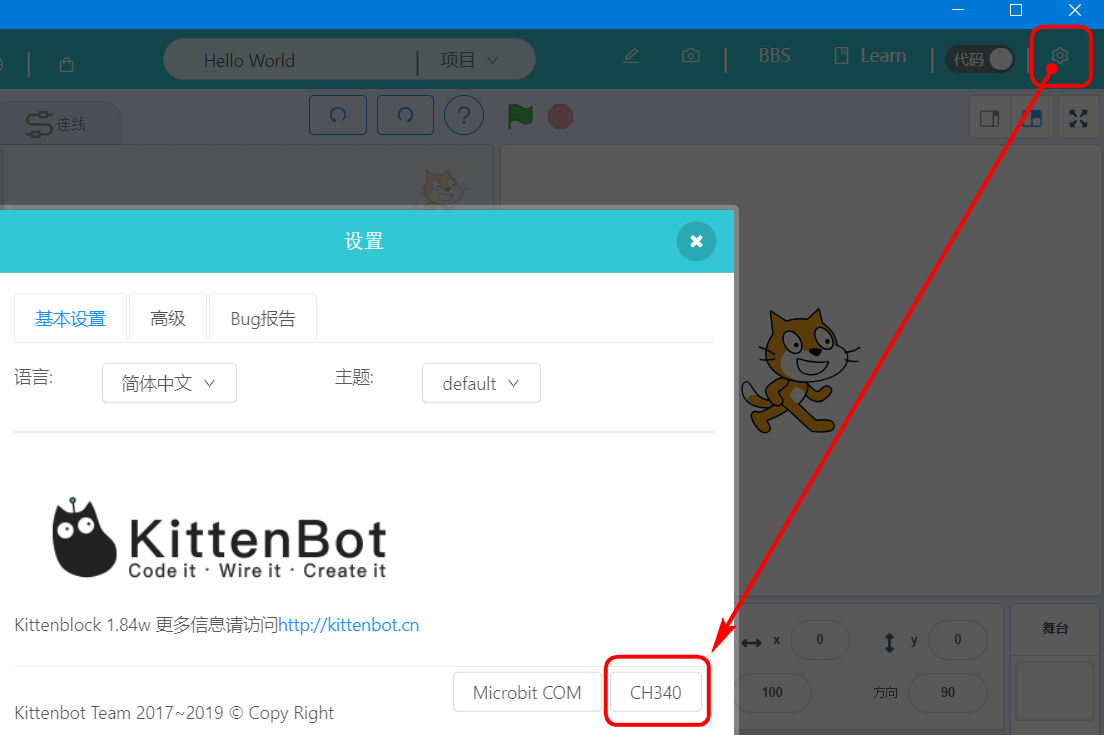
选择Rosbot,连接串口¶
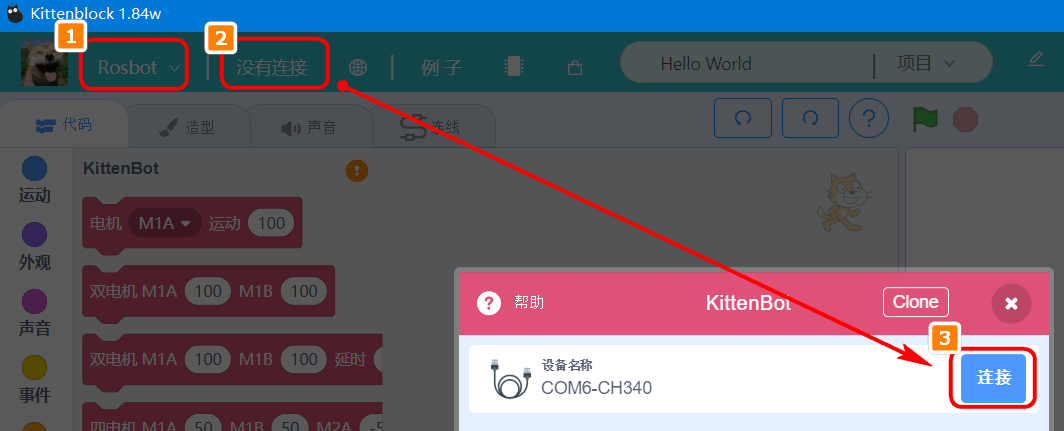
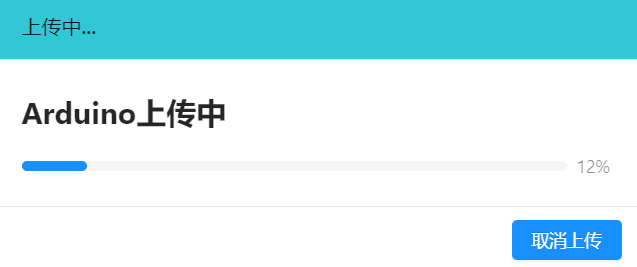
恢复固件¶

稍等片刻等待固件恢复上传,固件恢复成功后,即为——在线模式
注意
在线模式下(连接串口,恢复固件),直接点击积木块,板子或者传感器就会有反应。在线模式下一般用于程序调试,这样就不用每次修改程序又下载一次,节省时间。如果发现在线模式下控制没反应,请检查是否连接串口恢复固件!
如何离线下载¶
假设你已经在线模式下调试好程序了,想下载到主控板上,脱机运行。
程序必须包含绿旗子帽子模块,否则积木块无法转换为代码,点击右上角代码切换按钮。
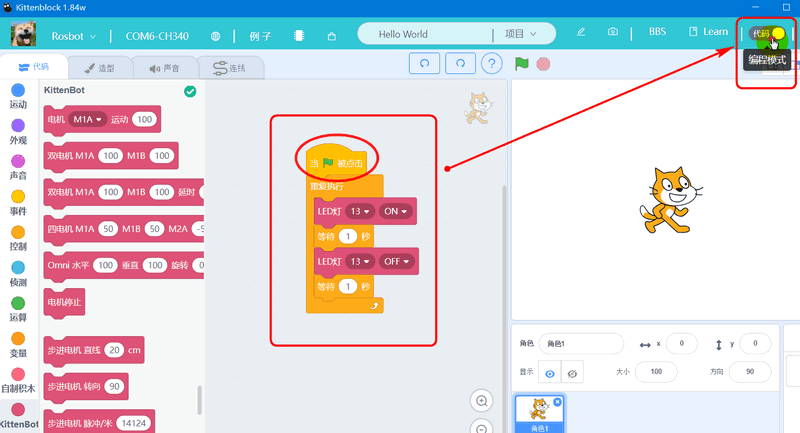
积木转为代码,实时转换
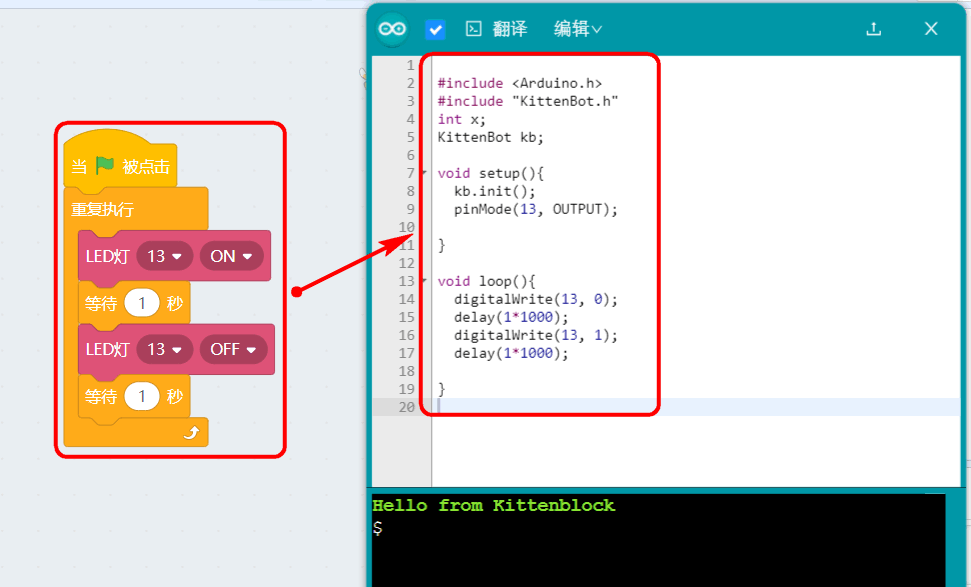
左侧的勾勾是指——自动翻译,如果不打勾,积木转代码就需要自己手动点击“翻译”按钮
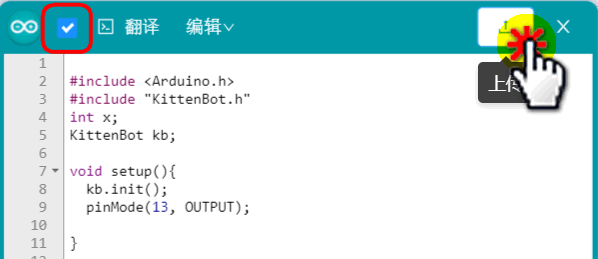
等待程序上传,上传完毕后,程序就能直接跑起来。
注意
假设你已经下载了你自己的程序,你想用在线模式,这时你需要重新恢复固件。
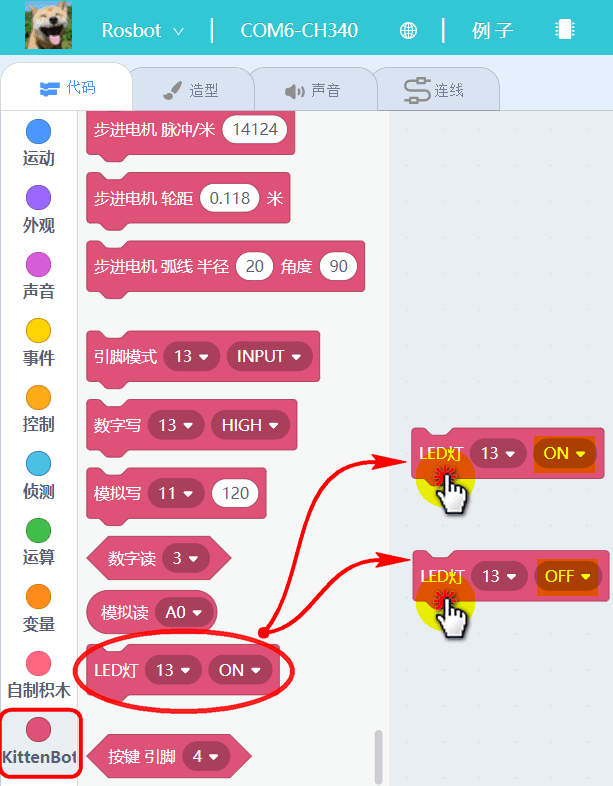
关于Rosbot的更多积木块¶
大家可以参考我们之前的Kittenbot钣金车(主控板是Rosbot)的教程
虽然是之前的教程,积木块大体都是一样的,学习一定要动手尝试。
http://learn.kittenbot.cn/zh_CN/latest/kits/kittenbotKit/index.html


常见问题与解答¶
问题0:哪里可以卖到这么优秀的扩展板?
答案:万能的淘宝 https://kittenbot.taobao.com/ 请认准小喵科技官方淘宝店
问题1:怎样给Rosbot主控板供电?
答案:
方式1:用移动电源插到Rosbot主板上的usb口上。
方式2:6~12V的电源插到板子上的外部电源口上。
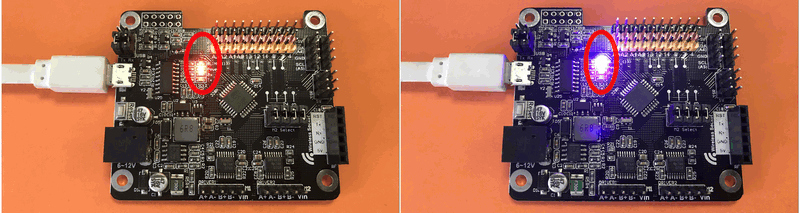
问题2:控制M2电机接口的时候,13脚的蓝色灯会亮?
答案:是的,M2电机接口复用了13脚的LED灯
问题3:使用IO口7、8、12、13任意一个IO口的时候,M2电机控制好像不正常?
答案:是的,7、8、12、13刚好和M2电机接口复用了。所以不能同时用,要用IO口的时候,要把跳帽给拔了。
问题4:IO插反会不会烧坏?
答案:有可能,所以插接模块,必须反复确认安装是否正确!
问题5:可以把主控板放在金属表面吗?
答案:不能,板上有很多针脚,放在金属表面会短路!
问题6:板子上有很多跳帽,我可以随意拔掉吗?
答案:不可以,尽量保持跳帽处于出厂的状态,如果要拔跳帽,要注意问下小喵的技术人员
问题7:Rosbot主控板可以用Arduino的IDE编程吗?
答案:可以的用法,一样,并且板子上还多了一些资源。具体一些控制指令可以参考Kittenblock中的积木转代码窗口查阅