线条检测追踪¶
线条追踪一般用于小车视觉巡线。
按键A触发颜色校准¶
巡线追踪与颜色追踪类似,都是需要先进行颜色校准
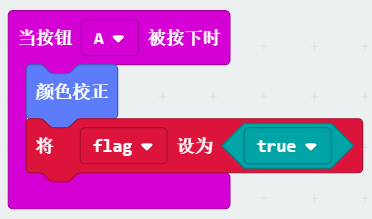
颜色校准触发后,AI模块会出现一个绿色小方块在屏幕中央,把要识别的颜色放在小方块处(这里放置了一支黄色的笔),等待一会,颜色校准成功,即可。检测的颜色需与背景明显区分开


程序结果¶
把程序下载到Microbit后,将纯色的直线物体(如水彩笔)放到镜头前并按下按键A进入校准模式,校准成功后,可以看到颜色已经可以进行追踪了。
常用问题和解答¶
1,为什么我重新打开电源,按按键A,不能进入颜色校准?
答:KOI鲤鱼魔块初始化启动是需要时间,明显比Microbit慢。Microbit的初始化程序(串口指令控制加载Yolo模型)已经跑完了,KOI还没初始化。因此按按键A没有反应
解决办法:打开电源后,重新按下Microbit背后的Reset按键,让Microbit重新开始运行(秘诀即让KOI魔块先运行起来,再让Microbit进行运行)
2、KOI鲤鱼魔块我直接3V电源可以吗?
答:不行,必须要接5V!
3、如何提高巡线的识别率
答:尽量保持干净的背景