Robotbit¶
购买链接¶
转到淘宝购买———-→Robotbit v2.2
产品名称:¶
RobotbitV2.2
适用人群:小学生/培训机构/家长/爱好者 配套Microbit进行使用
配送清单¶
RobotbitV2.2 X1
其他配套Microbit或者硅胶保护套、电池根据实际购买套餐配送
KittenBot团队专为Microbit量身定做的优秀机器人扩展板。现还有配套3D打印保护壳
产品特色¶
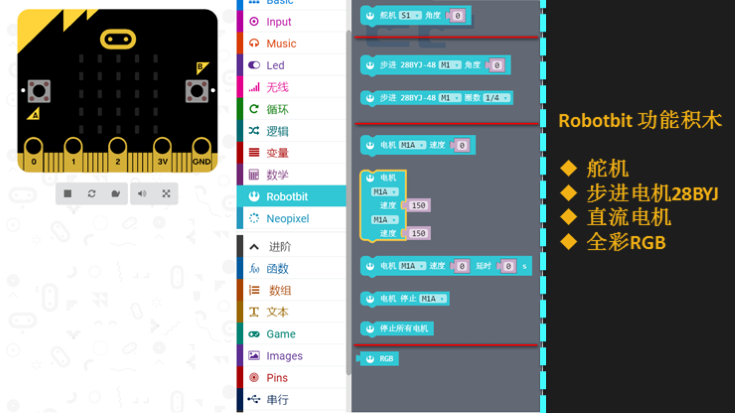
具有强大的直流电机、步进电机、舵机的驱动能力,板载RGB灯与蜂鸣器,并把Microbit空闲引脚全部引出,支持arduino以及市面上的常见电子模块。
自带18650电池座,集成锂电池升压、充电、保护芯片。支持外部电源输入。
支持扩展至KittenBot机器人底盘以及乐高标准孔。强大的驱动能力与自带电池可使DIY更加方便自由。
受到学校老师培训机构和个人爱好者的一致好评,microbit教学/diy选择Robotbit不会有错!

功能性参数¶
18650电池电压:3.7V
USB输入电压:5V
VM引脚最大:1A(在板载电池的支持下)
绿色端子电压(外部电源输入):5V(最大支持6V输入,切勿接超6V的电压,最大电流支持3A)
软件支持¶
配套硬件:Microbit
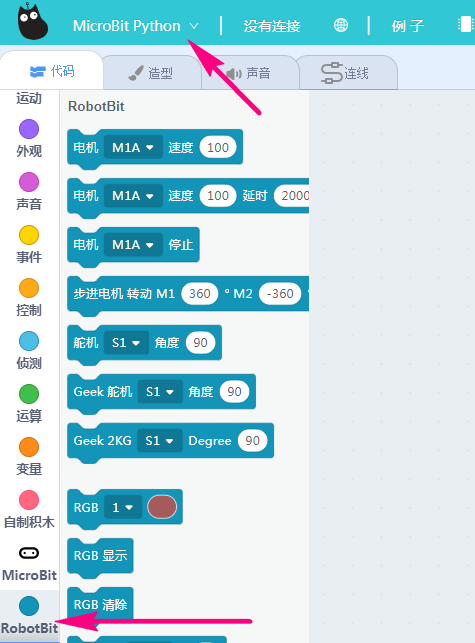
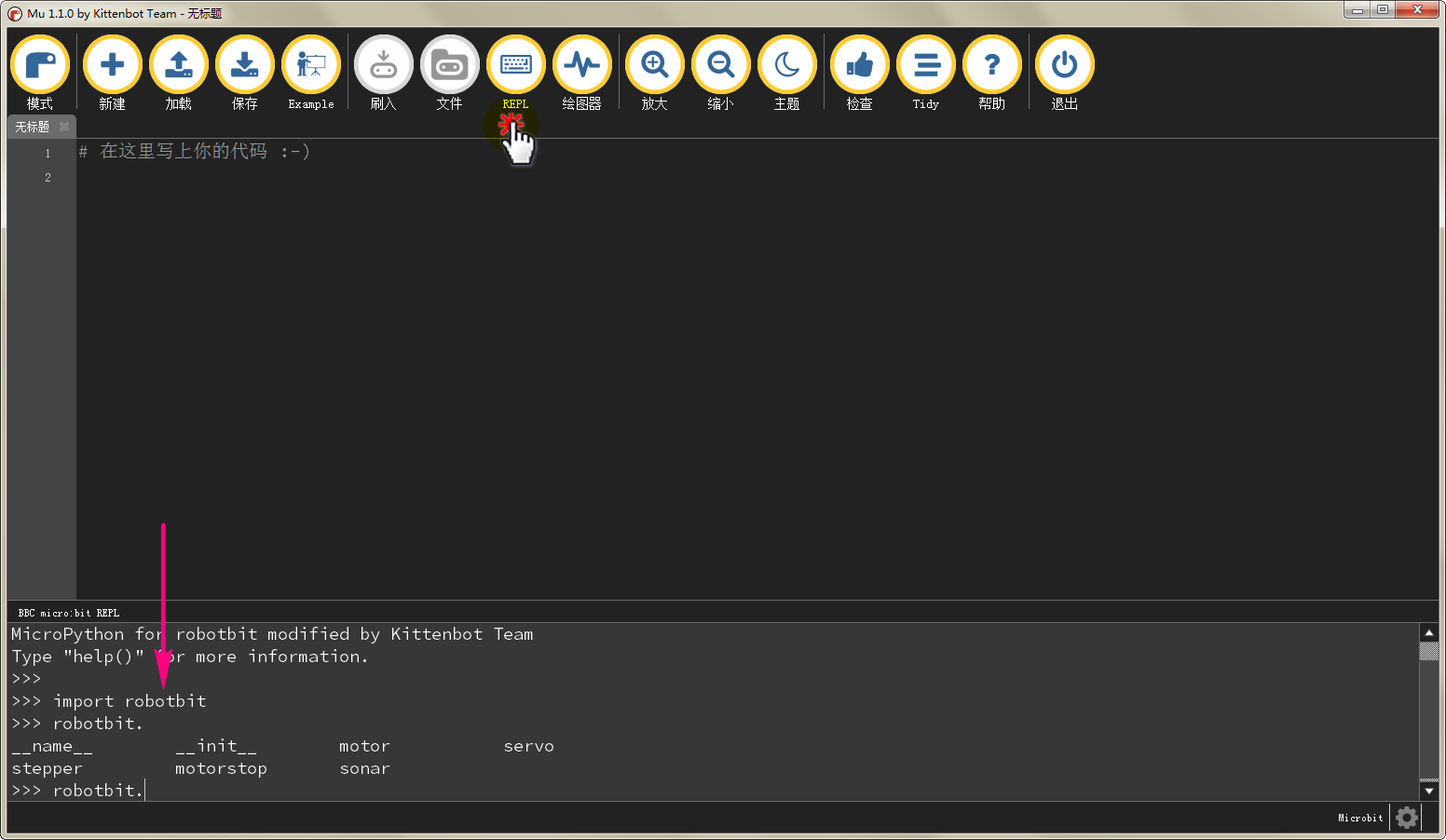
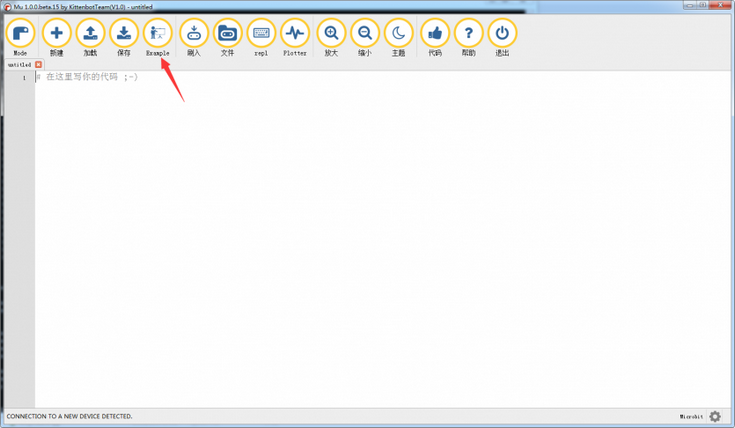
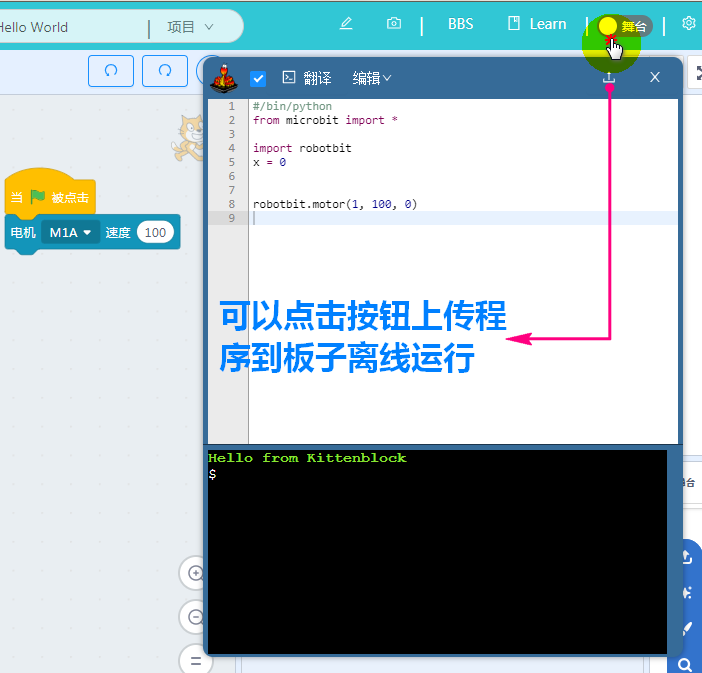
编程方式:Kittenblock / Makecode /python(Mu editor)
MakeCode微软官方¶

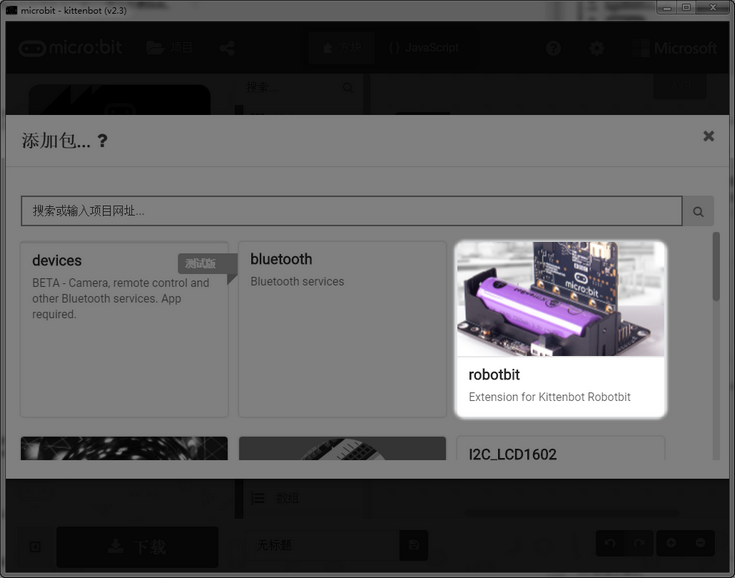
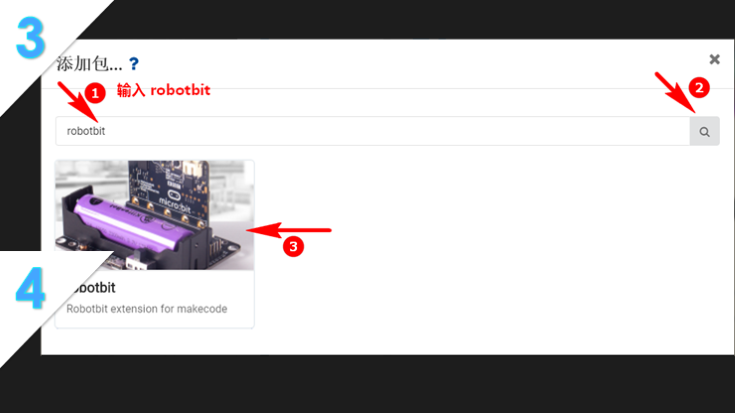
在makecode添加包中直接搜索Robotbit(小喵科技的扩展板插件已经通过微软官方认证,是实力的象征)
在小喵makecode离线版本中,添加包列表可以显示Robotbit以及其他集成扩展包(Robotbit可以离线加载不依靠网络,其他的扩展包不可以)

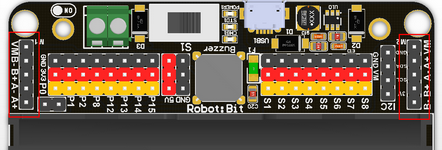
硬件接口¶
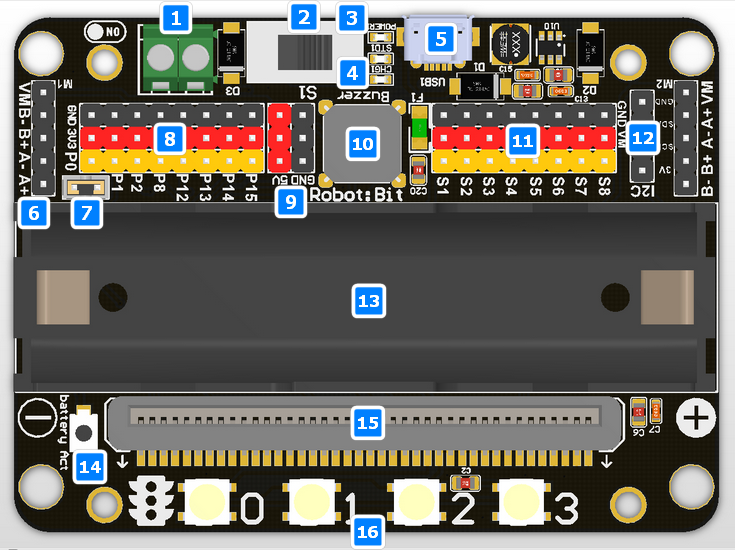
5V外部电源端子(防反接)
电源开关
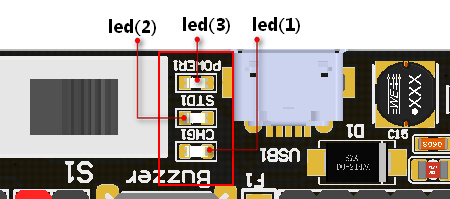
电源指示灯
电量指示灯
Micro充电口
4路直流电机/2路28BYJ步进电机
蜂鸣器跳线帽
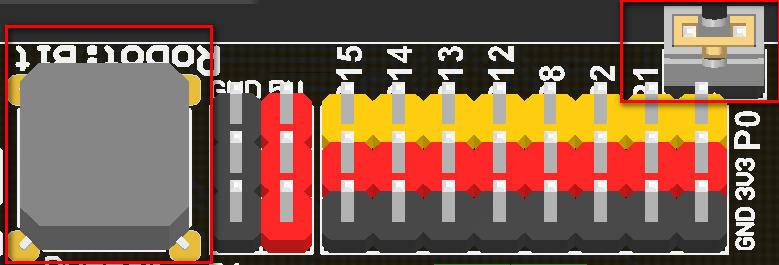
8路IO(对应Micro:bit P0-P2、P8、P12-P15)
5V与GND排针
无源蜂鸣器
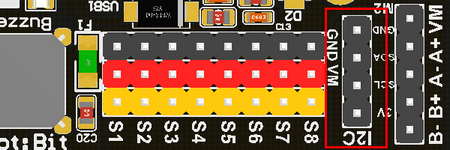
8路舵机3PIN接口
I2C接口(可拓展I2C模块)
18650锂电池座
电池保护激活按钮
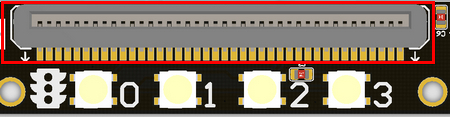
Microbit插槽
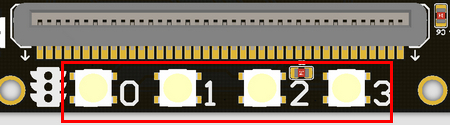
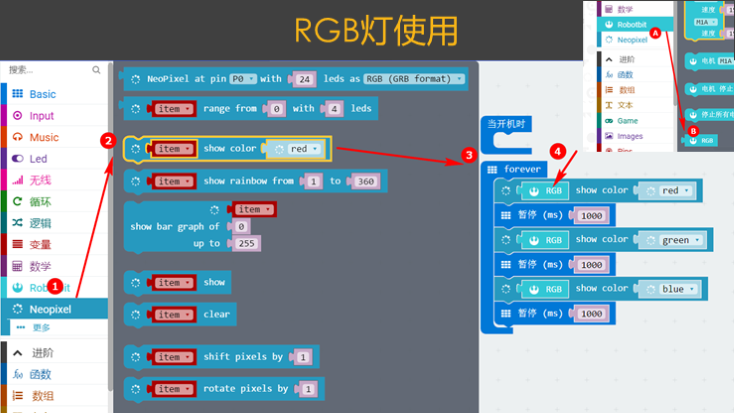
4路全彩RGB
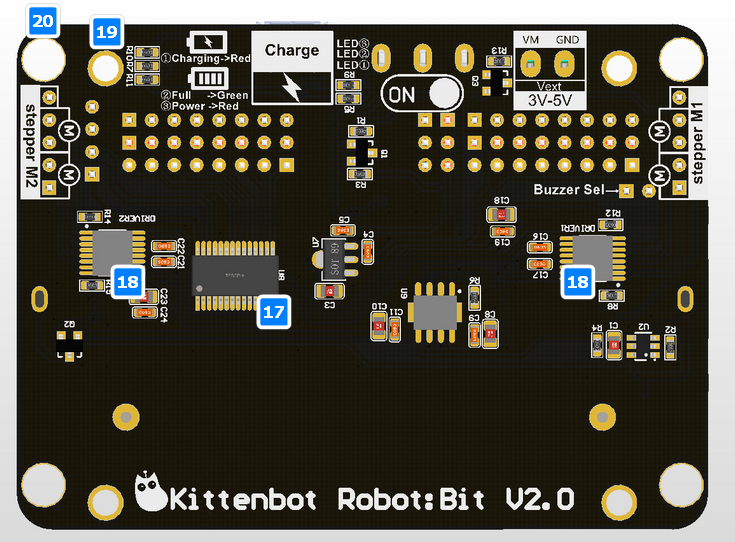
舵机驱动芯片
电机驱动芯片
标准KittenBot机器人底盘固定孔
标准乐高孔
Robotbit各个部分详解¶
18650电池座¶
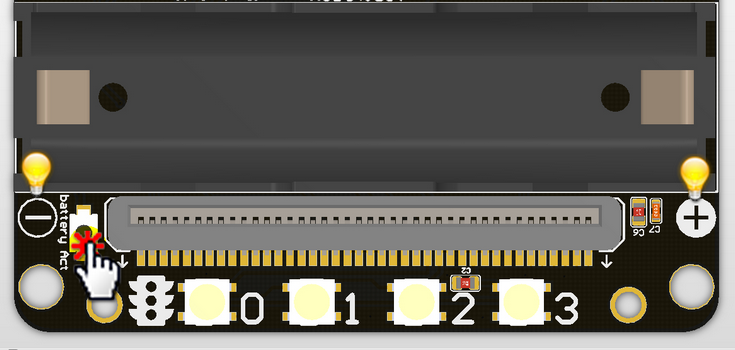
收到扩展板首先安装18650锂电池,注意电池正负极,切勿装反(虽然防反接功能)
当第一次安装电池时,拓展板处于待激活状态(电源灯不亮),此时需要短按一下电池保护激活按钮或连接usb供电.
使拓展板进入正常工作模式(如果你重新安装电池,就需要操作这个步骤)
18650电源开关¶
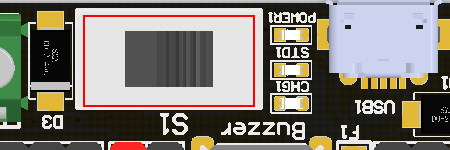
开关打开后(拨向绿色端子那边为打开开关),为Micro:bit和扩展板的接口供电(扩展板需要装上18650电池)
Micro usb充电口¶

注意
只能用于充电,不是用于程序下载
电脑供电或任意5V 1A或者1A以上的手机充电器均可为KittenBot原厂18650锂电池充电
5V1A的充电器约2.5小时充满,建议充电时关闭电源。充满会自动截止,指示灯变绿 不会过冲
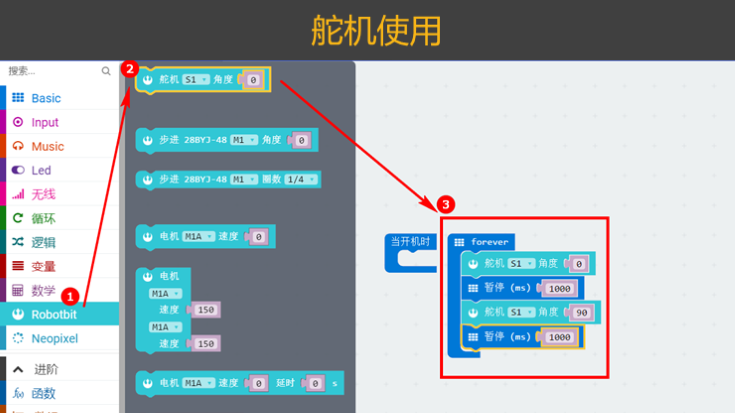
8路舵机标准3Pin接口¶
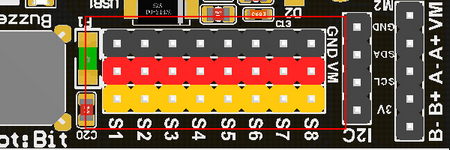
8路舵机实际通过专门的舵机扩展驱动芯片与Micro:bit的I2C口控制,而非IO口控制
扩展板在KittenBot原装电池状态下,最多能支持8个9g舵机(总电流<2A),禁止使用MG995等大电流舵机,以免烧毁扩展板
扩展板在外部电源接口(绿色端子)供电状态下(5V 3A或者3A以上),最多能支持总电流不超过3A的舵机。
注意
舵机接口不能作为普通IO口使用,只能驱动舵机
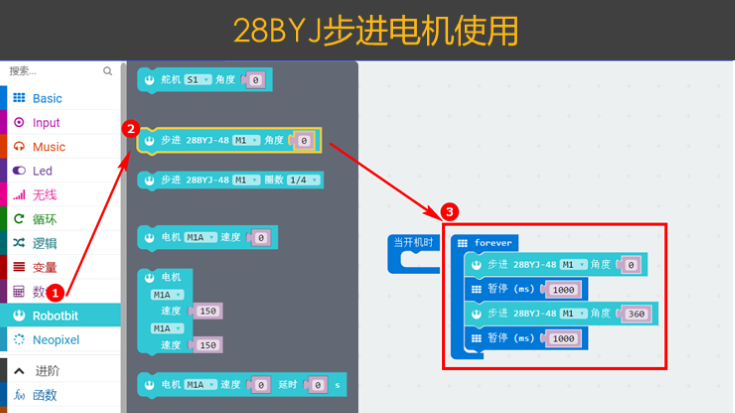
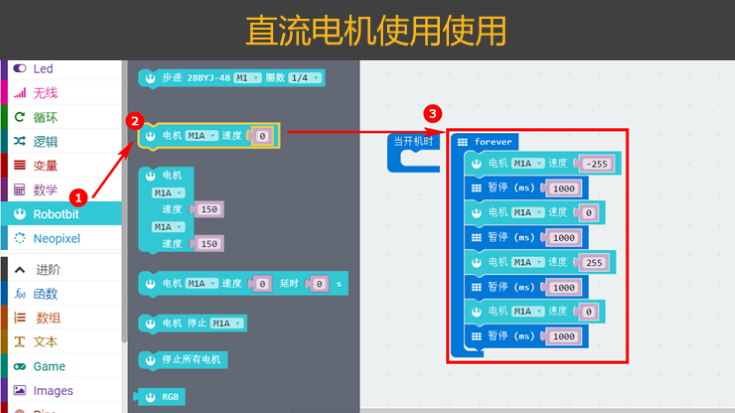
支持4路直流电机/2路28BYJ步进电机¶
在KittenBot原装电池状态下工作,一共可以同时控制4路(左右两侧合计)TT马达,或者2路步进电机(与舵机合计总电流<2A),禁止接大电流电机和大电流步进电机,以免烧毁扩展板
支持直流电机与步进电机混搭使用(2个直流电机与1个步进电机)(与舵机合计总电流<2A)
蜂鸣器与跳帽¶
蜂鸣器跳帽出厂默认已插上,对应蜂鸣器与Micro:bit的P0口连接
如果想正常使用P0口的IO口读写功能,需要把蜂鸣器跳帽拔下来
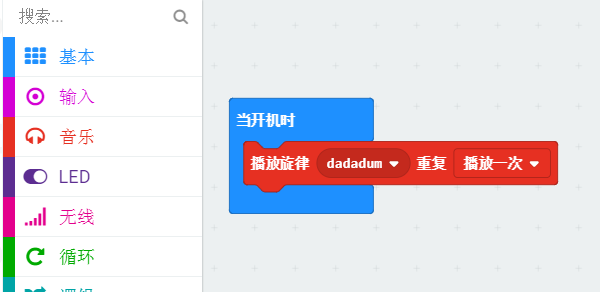
蜂鸣器硬件上的电气连接与Microbit的Music积木块是对应的,可直接使用Music控制蜂鸣器
Micro:bit的IO口引出¶

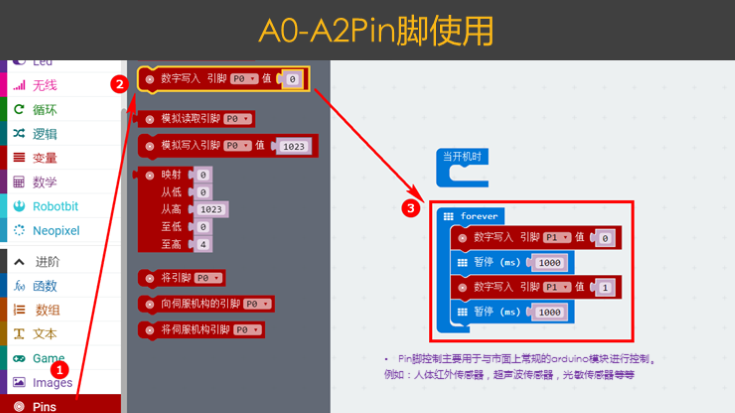
已经将Micro:bit上P0-P2、P8、P12-P15转出到扩展板上(P0使用时需要拔掉跳帽) 标准的arduino 3PIN接口,支持市面上的Arduino模块与常用模块 P0-P2支持数字读写和模拟读写,P8、P12-P15只支持数字读写 如果需要使用5V输出模块,可以接3PIN接口左侧的5V电源(3PIN接口的电源默认是3.3V)
2PIN外接电源端子¶
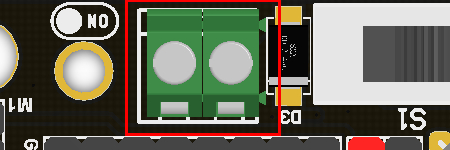
虽然有防反接功能,但是还是接线需要注意正负
接线端子支持DC 5V的外部电源供电,推荐5V 2A以上适配器电源供电以满足拓展板驱动高扭矩舵机的电流需求
内部电源供电时,舵机VM接口电源为18650电池电压3.7V;当使用外部电源供电时,舵机VM接口的电压为5V 负载电流最大3A
Robotbit新手必看快速入门教程¶
把18650电池装到Robotbit上,注意正负¶

把Microbit插到Robotbit上,注意插接方向¶
点击电池激活按钮¶
打开18650电池开关¶
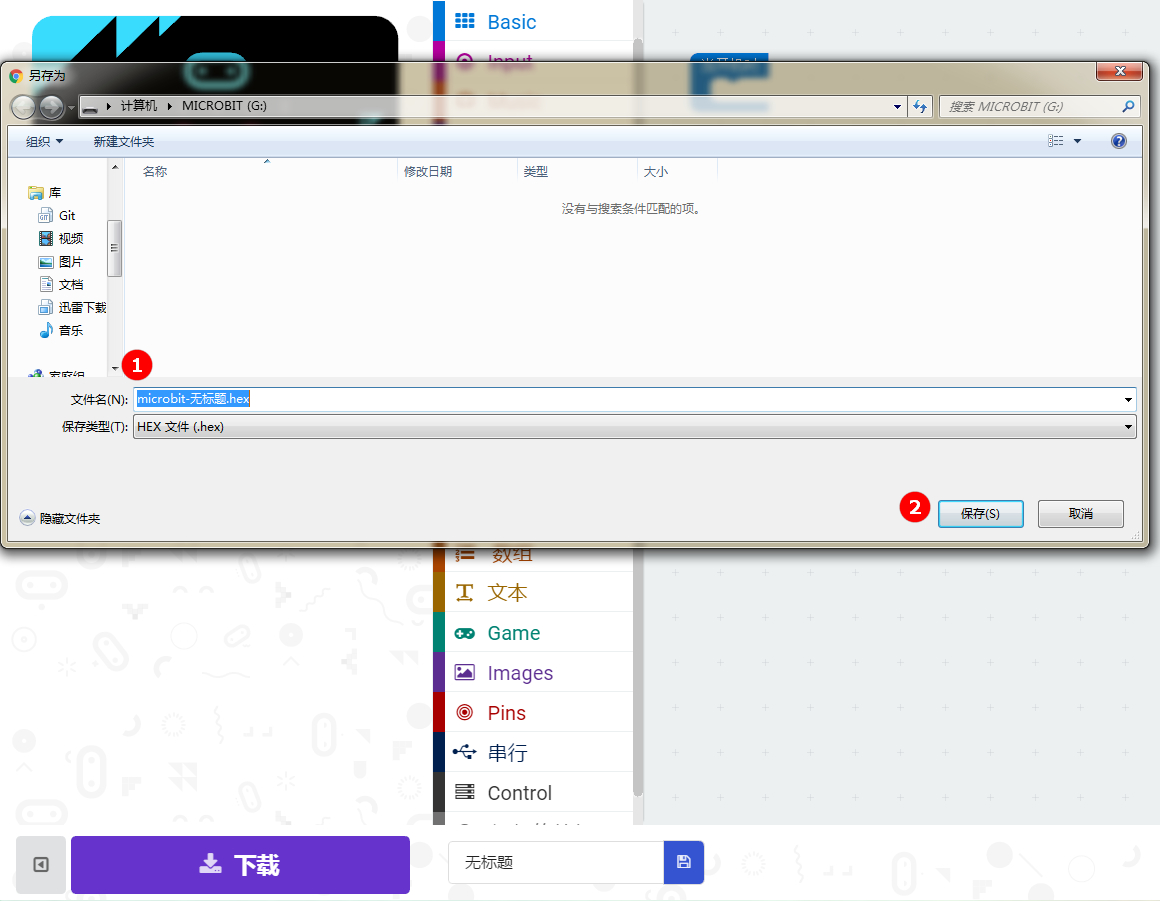
打开makecode的网址¶
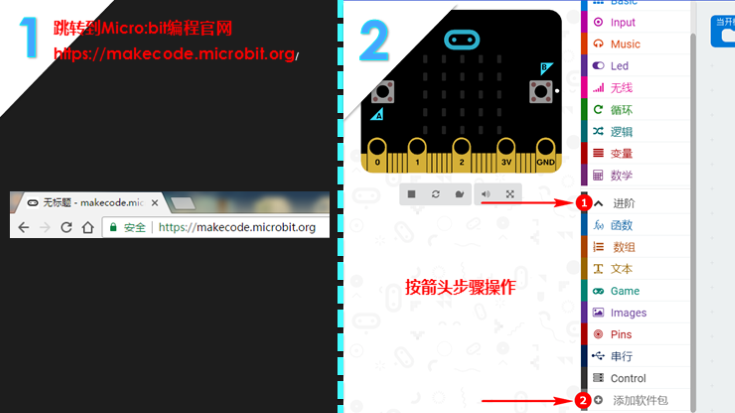
搜索robotbit¶

把robotbit的一些积木块拖拽出来进行编程,编程记得对应连接相应的电机舵机等等..¶
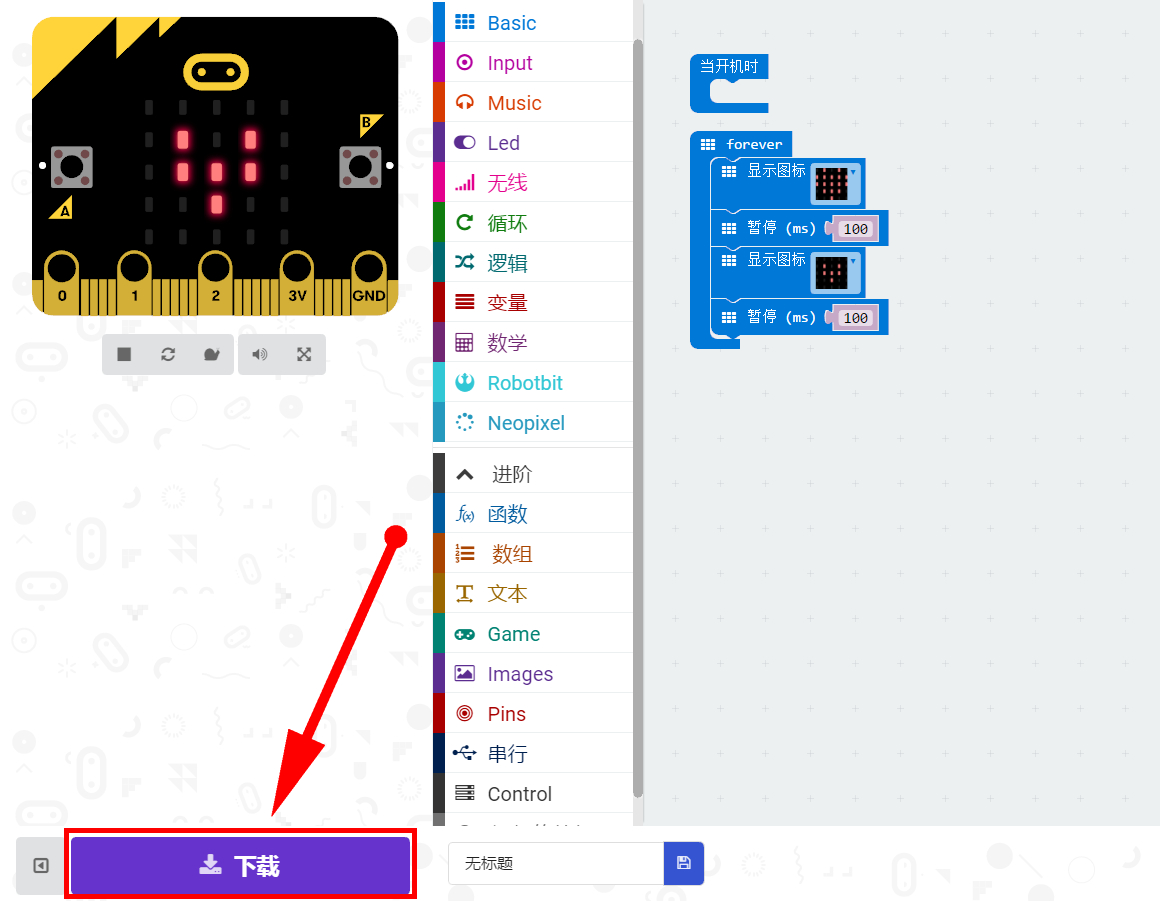
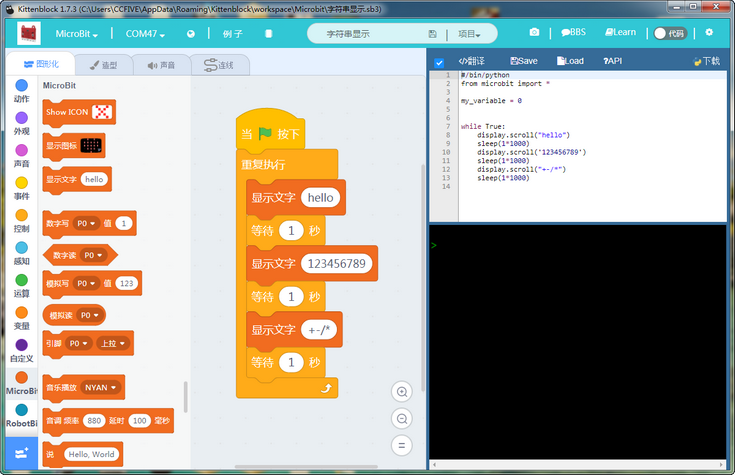
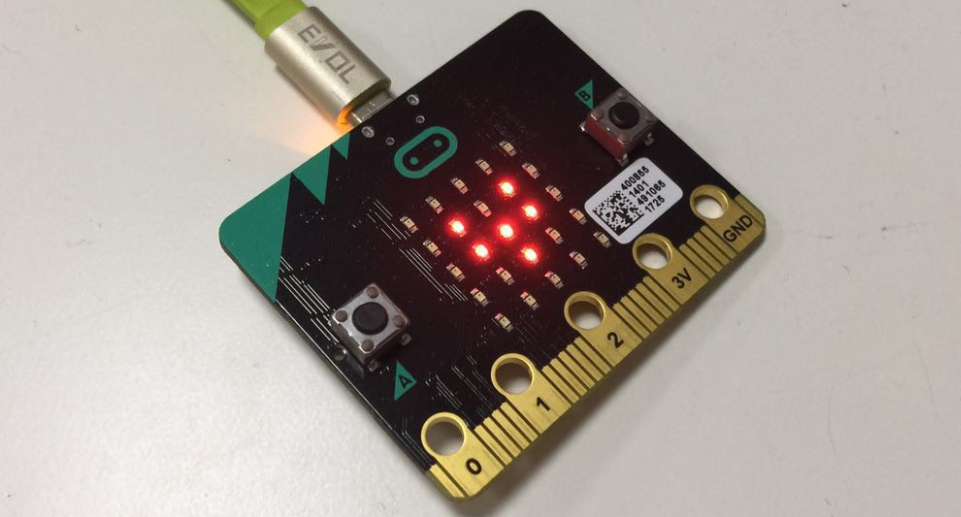
控制点阵屏的实验现象¶
有没有视频教程?¶
请直接跳转网易云课堂,视频是之前录制robotbit的V1.3,编程使用方法上没有区别,使用上也是大同小异,注意引脚接线即可(另外说明1.3版本的A0-A2对应2.0版本的P0-P2) http://study.163.com/course/courseMain.htm?courseId=1005485001&share=2&shareId=400000000501010
FAQ常见问题与解答¶
电池插上去没有,打开开关没有反应?¶
检查是否已经按了电池激活按钮?
检查电池正负是否接反?
检查电池是否有电?
电池激活按钮用什么用?¶
在过流,或者短路,或者打开开关插拔电池这些瞬间异常大电流情况下,电池保护芯片会启动工作,保护电路的安全性。点击电池激活按钮,即可恢复正常工作模式
插上usb电脑找不到Microbit¶
robotbit上的usb只能用于充电,不能用于下载程序,插到robotbit的usb口上,电脑是不会有反应的
电池插反会不会烧?¶
不会,robotbit的设计考虑到一般性失误操作而做了防反接处理。插反不会供电
Microbit插反会不会烧?¶
不会,另外Microbit插反只会不工作
P0引脚控制没有反应?是不是坏了?¶
PO是通过跳帽默认连接到板子的蜂鸣器上,可以直接用makecode中的music模块进行控制蜂鸣器。如果要使用P0口,需要拔掉跳帽
Microbit上可编程IO口不止8个剩下的都去哪里了?¶
Microbit上可编程IO口接近20个,但是很多已经与板子上的点阵按键复用了。考虑到复用带来的不方便性对,新手容易带来误解,小喵引出了8个(跟板子资源没有复用的IO口)已经完全足够应对日常的DIY。如果你对IO数量有狂热的追求,可以选择喵家另外一款扩展板IObit
舵机排针可以当编程IO口使用吗?¶
不能,舵机s1-s8使用专门的舵机驱动芯片拓展出来,只能用于舵机驱动
电机接口那边的VM有什么用?¶
平时使用直流电机是用不到VM,直流电机只需要插A+A-或者B+B-。使用4相5线步进电机的时候,刚好VM就用上了,详细请看Robotbit控制步进电机的视频教程
板子可以放在金属表面或者潮湿环境下使用吗?¶
不行,会短路的,要注意绝缘
绿色端子外部电源应该接几V电源?插高压电会烧坏吗?¶
只能接5V,高于5V都会烧毁板子,电流建议2~3A,也就是说板子最大支持的电流是3A
我按照教程做得,得不到实验结果¶
如果实验得不到对应的结果,请首先检查自己的接线和程序,一般就是有些小地方遗漏了,请再三检查下
电路板好像烧坏了,怎么办小喵有保修么?¶
robotbit在工厂出厂都进行过硬件程序测试,保证了功能的完好性。
首先先排除下是不是程序使用问题。如果你确定烧坏了,可以寄回来给小喵,小喵只收取元件的成本费,没有多少钱。具体价格咨询淘宝客服,根据实际损坏的严重性进行评判
请用购买账号联系小喵淘宝店的客服,咨询相关维修的问题。
需要写清楚
姓名,电话,地址,方便小喵寄回去板子给你
还有板子问题描述,方便工程师快速定位问题给你维修。谢谢你们的配合这样会缩短维修的时间