乐高2KG伺服舵机/乐高减速电机¶
购买链接¶
转到淘宝购买———-→2KG减速电机/伺服舵机
产品名称¶
Geekservo 2KG 乐高伺服舵机/乐高减速电机
配送清单¶
可混批
产品简介¶
自2018年推出推出的Geekservo系列,第一款Geekservo 9G,引领大家从以前那种常规的蓝色9g小舵机走向了乐高体系的舵机,解决了传统舵机与乐高结构件的连接问题。Geekservo 9G是由传统的蓝色9G小舵机演变过来,定位是简单的连接用法。所以2KG系列是继Geekservo 9g系列的又一乐高结构执行器。主要优化了以下体验以及增强了属性
用户的各种创新用法,已经远超我们的设计预期。进阶过程中,搭建比较紧凑和齿轮配合的机构总会遇到半孔的位置尺寸问题
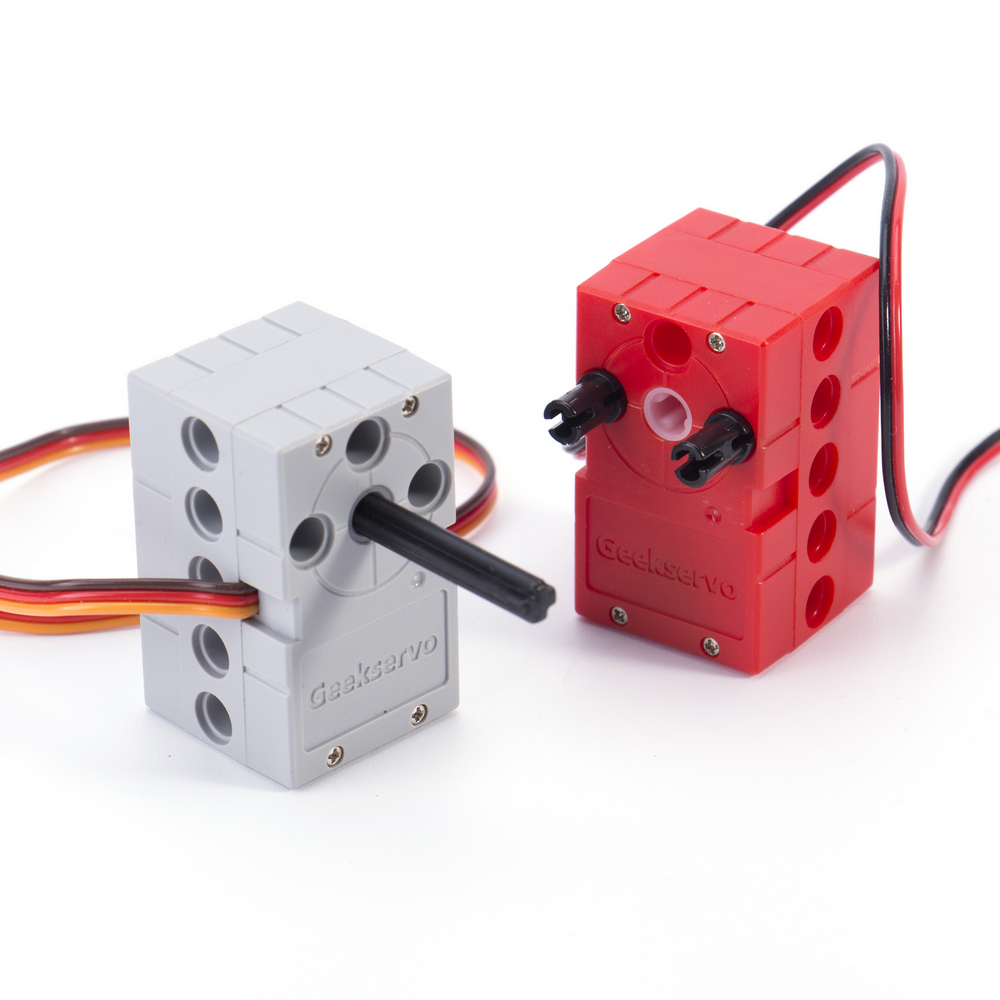
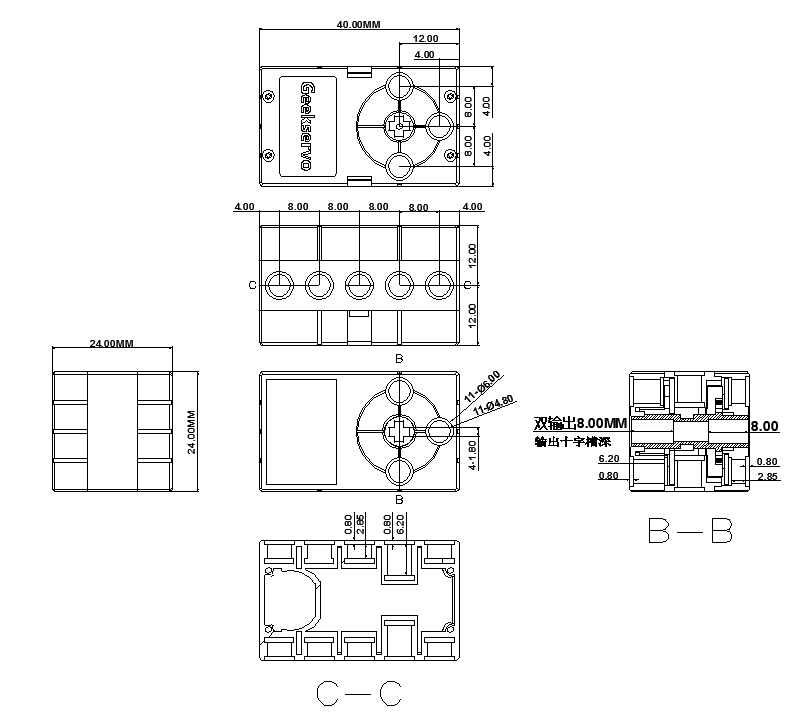
外形结构上采用中规中矩的长方体形式。不再考虑兼容乐高砖块形式,只兼容乐高的科技件系列。结构紧凑,两侧和上下两个面有半孔和全孔的插销孔。
颜色体系上与第一款 Geekservo 9G一致。乐高灰对应伺服舵机类型,乐高红对应减速电机类型
程序控制上与常规舵机控制类似。脉冲宽度500-2500us(9g舵机脉冲宽度600-2400us)
软件程序上Kittenblock与Makecode都有图形化积木块进行支持,Arduino IDE有示例代码
产品特色¶
Geekservo 2KG舵机/电机就应运而生。小喵科技与工厂联合开发,具有独家专利
在继承了Geekservo 9g所有的特点优点情况下,增强了扭矩和速度,改善了结构使之禁得住各种结构搭建的考验
输出轴采用十字沉孔处理
可以根据用户需求,自由插入不同长度的十字轴,拼装更灵活更方便
转动角度范围大
舵机控制范围0~360度(注意,这里指的是区间,而不是电机的可持续转动)
扭力更大
扭力是之前Geekservo第一款的扭力3倍左右
产品参数¶
灰色伺服舵机参数规格
工作电压:3.3V~6V
额定电压:4.8V
额定电流:70mA
堵转电流:900mA
打滑电流:700mA
最大扭矩:1.6±0.2 kg-cm (4.8V)
角度转速:60°/0.14s
净重:20g(单个)
红色减速电机规格
工作电压:3.3V~6V
额定电压:4.8V
额定电流:200ma
堵转电流:700ma
打滑电流:450ma
最大扭矩:1.6±0.2 kg-cm (4.8V)
最高转速:45rpm(3V供电情况下)
净重:20g(单个)
线序介绍¶
灰色伺服舵机
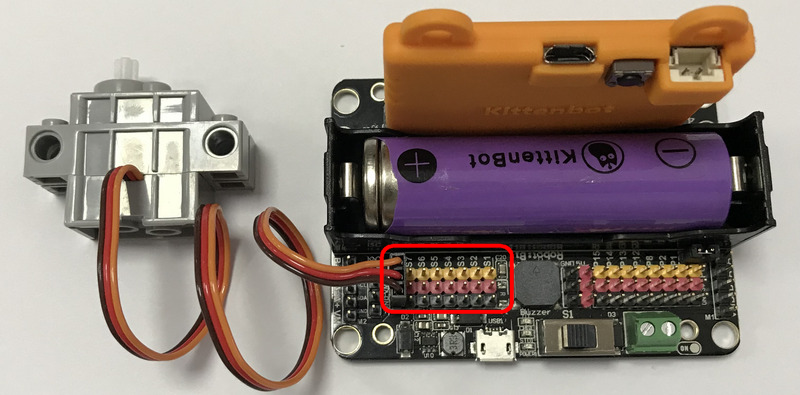
为常规舵机的线序,黄接数据引脚(控制引脚)、红接正极、棕接负极
红色减速电机
红色正极,黑色负极,但实际使用中可以不用区分,反接只会导致旋转方向改变
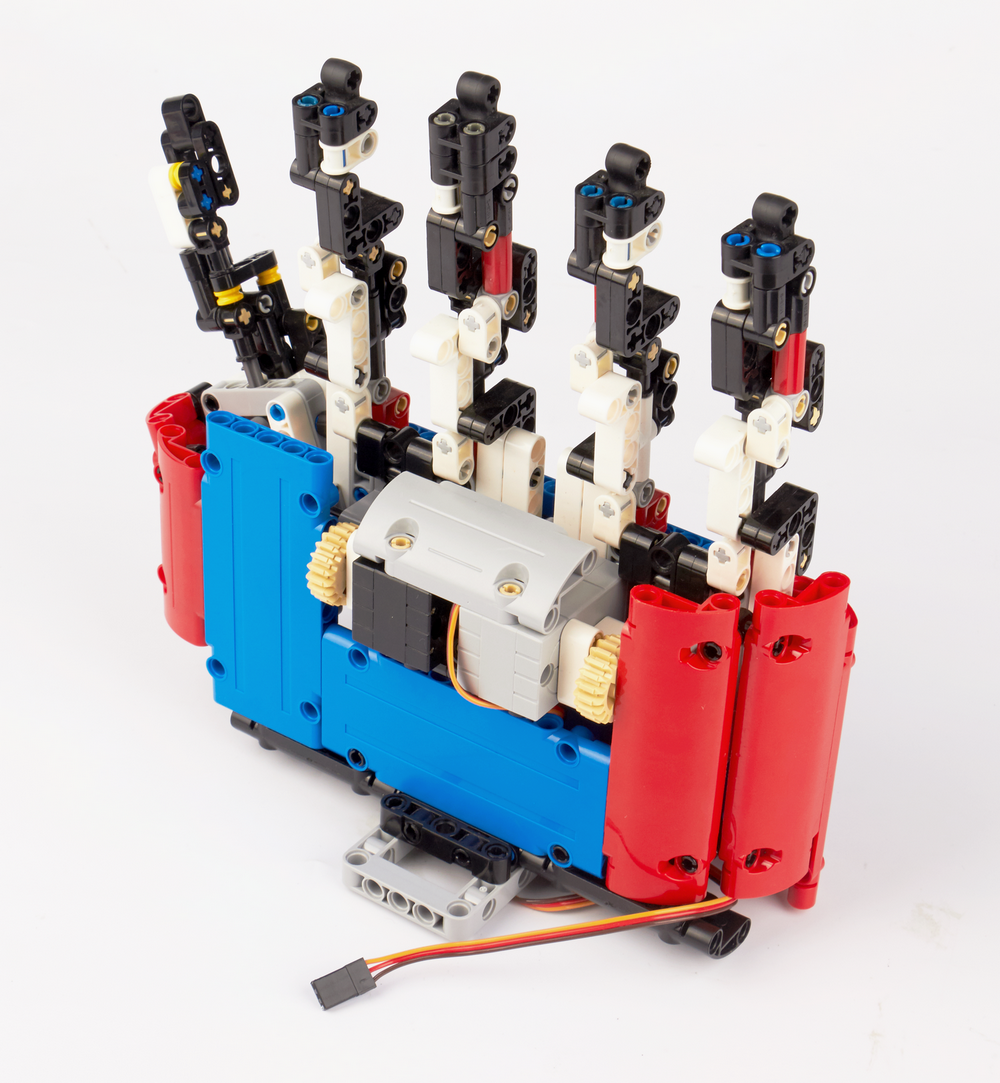
机械安装实例¶
与主控板连接方式演示¶
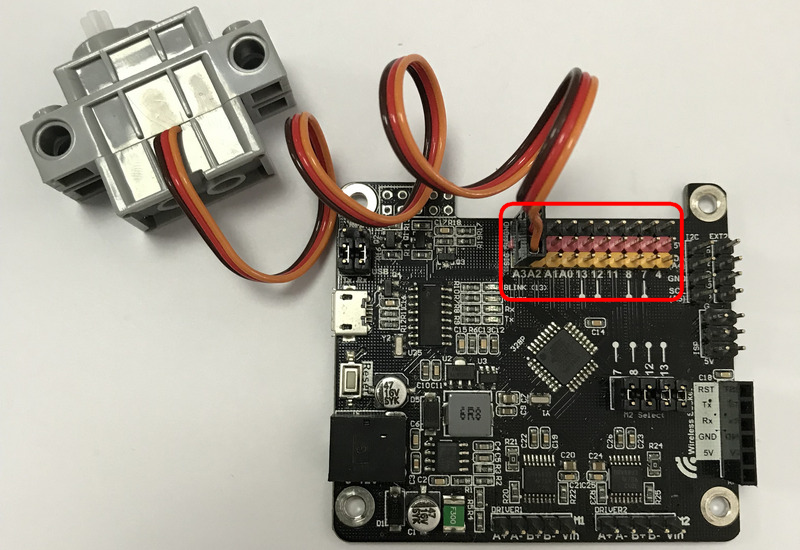
灰色伺服舵机
针对Robotbit,有S1-S8的舵机接口可以接,
针对Rosbot,所有IO均可接
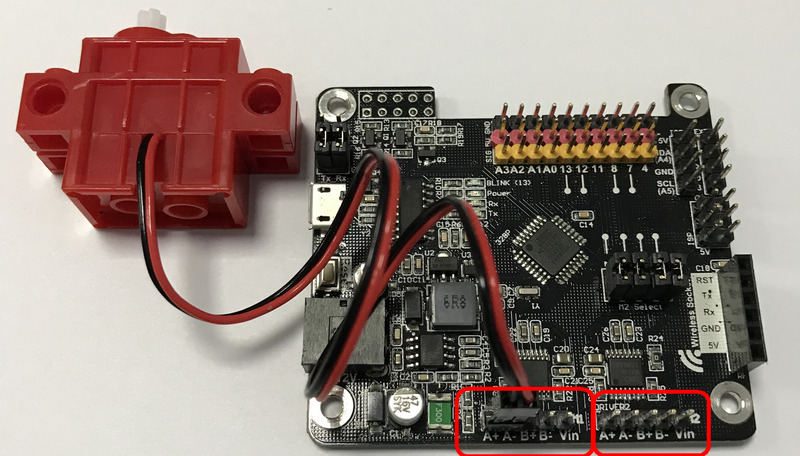
红色减速电机
针对Robotbit,有M1、M2的A+A-、B+B-接口可以接
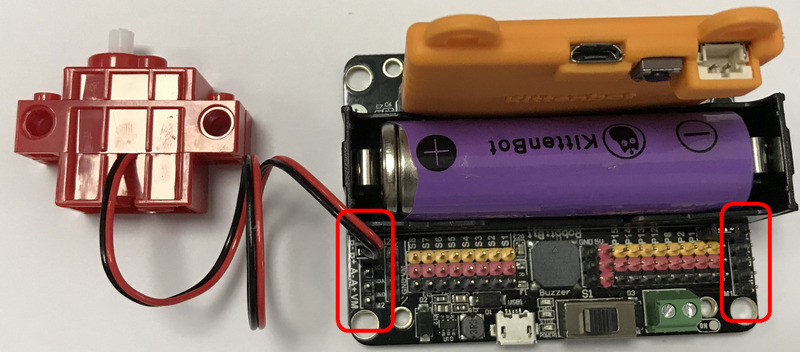
针对Rosbot,有M1、M2的A+A-、B+B-接口可以接
图形化编程使用方式¶
Makecode编程方式
在喵家产品Robotbit、Powerbrick和Nanobit中都有用到,故我们提供了对应的插件,可以分别加载
Robotbit:https://github.com/KittenBot/pxt-robotbit
Powerbrick:https://github.com/KittenBot/pxt-powerbrick
Nanobit:https://github.com/KittenBot/pxt-nanobit
以下以Robotbit为例灰色伺服舵机
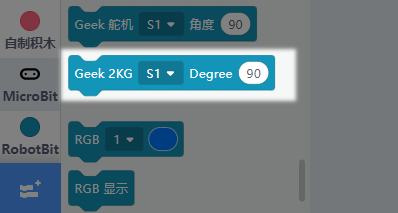
舵机相关积木
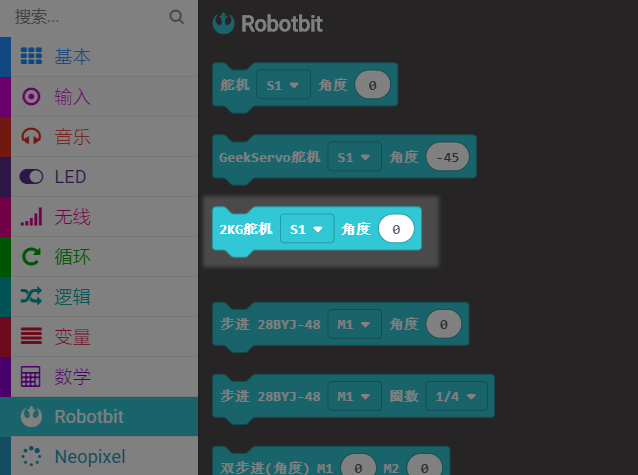
摆动的程序

红色减速电机
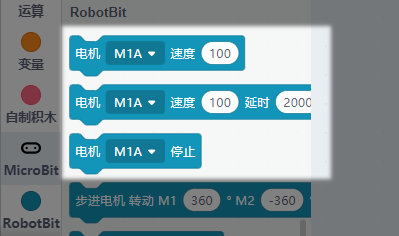
电机相关积木

转动的程序

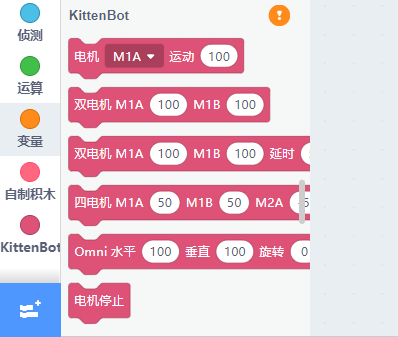
Kittenblock中控制方式
灰色伺服舵机
Robotbit(micro:bit)
Rosbot/Arduino


红色减速电机
Robotbit(micro:bit)
Rosbot
Arduino

代码编程方式¶
新手建议用上一节的Kittenblock图形化编程软件,有一定基础的才推荐使用代码操作。 以下只对灰色伺服舵机进行讲解,电机的的操作API请参照上述图形化编程转代码
2KG灰色舵机的 角度-脉宽
0度:500us
90度:1500us
360度:2500us
Microbit(micropython)
使用microbit自带的类中的write_analog(value)可以输出PWM,对应的占空比为0~1023对应0%~100%
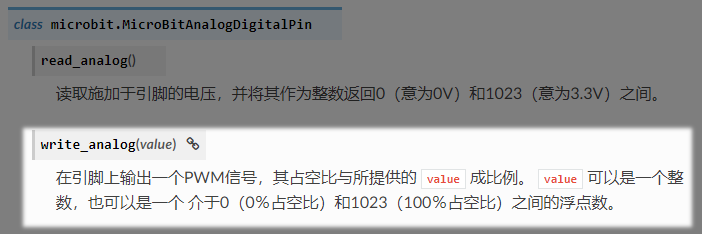
根据舵机的控制原理可知舵机的控制一般需要一个20ms左右的时基脉冲,那么从上面给出的角度对应的脉宽时间可有如下计算
import microbit microbit.pin1.set_analog_period(20) # 设置PWM信号的周期,默认就是20ms pwm = degree * 50 / 9 +500 # degree为你需要的舵机角度,pwm为脉冲宽度 D = pwm / 20000 # 换算成占空比 microbit.pin1.write_analog(1023*D) # 以P1脚为例,这样就可以对Geekservo舵机进行比较精准的控制
使用Robotbit的用户可以直接调用Robotbit库,请先下载喵家定制运行环境的Mu-edior,后具体转到Robotbit的API查看
Arduino(C/C++)
int angleMap(int degree){
return degree * 50 / 9 +500;
}
另外初始化的时候需要向Arduino声明舵机控制周期为600~2400us,以便重新计算定时器周期。
servo.attach(4, 600, 2400);
大家可以将下面的代码直接复制到Arduino中并烧录到主板上,注意例子中我们舵机接在4号引脚。
#include <Servo.h>
Servo servo;
int angleMap(int degree){
return degree * 50 / 9 +500;
}
void setup()
{
servo.attach(4, 600, 2400);
}
void loop() {
servo.writeMicroseconds(angleMap(0));
delay(2000);
servo.writeMicroseconds(angleMap(90));
delay(2000);
servo.writeMicroseconds(angleMap(180));
delay(2000);
}
注意事项:¶
2KG灰色舵机的转动范围:0~-360°,一共是360°,但不是连续转动,举例栗子,从0转动到360°,再从360°转到0是逆着回去的。
2KG灰色舵机有严格的线序之分,插接电路板请根据说明指引进行插接
2KG使用过程中禁止长时间堵转,长时间堵转有可能导致电机损坏